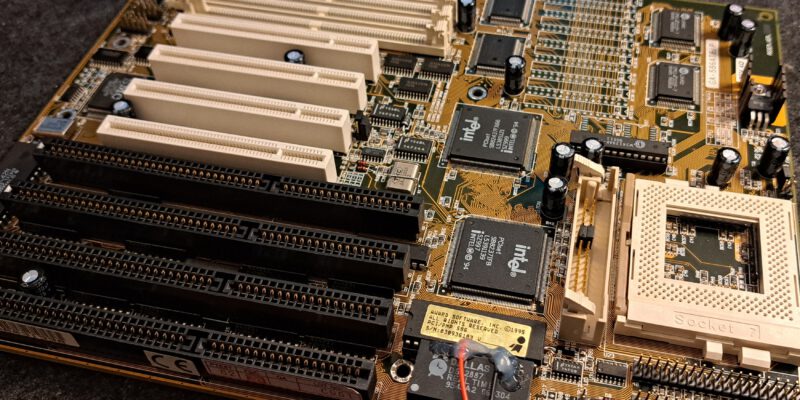
Retro Hauptplatine – GA-586ATE Rev 4.D
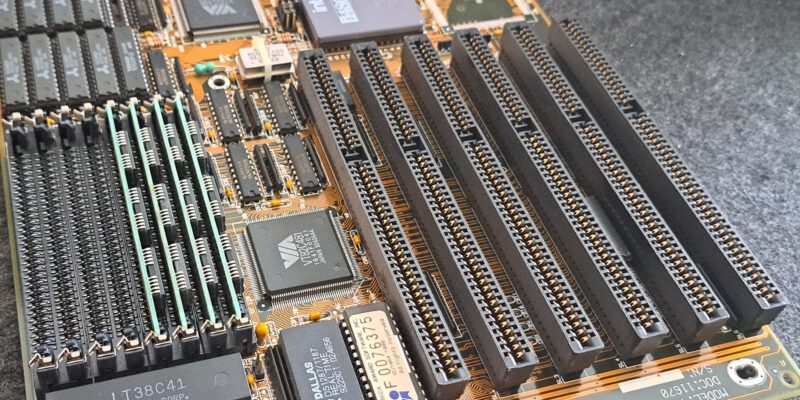
Eine Sockel 7 Hauptplatine für den Pentium I, mit nur einer Spannung also bis 166MHz ohne MMX. Das Board hat einen Intel 8243xFX Chipsatz. Es unterstützt nur 72Pin FPM und EDO Ram dafür aber sechs davon und bis zu 128MB. Meine 2x 32MB Module wurden auch erkannt. Wie der Benchmark zeigt ist diese Hauptplatine, mit …
Weiterlesen