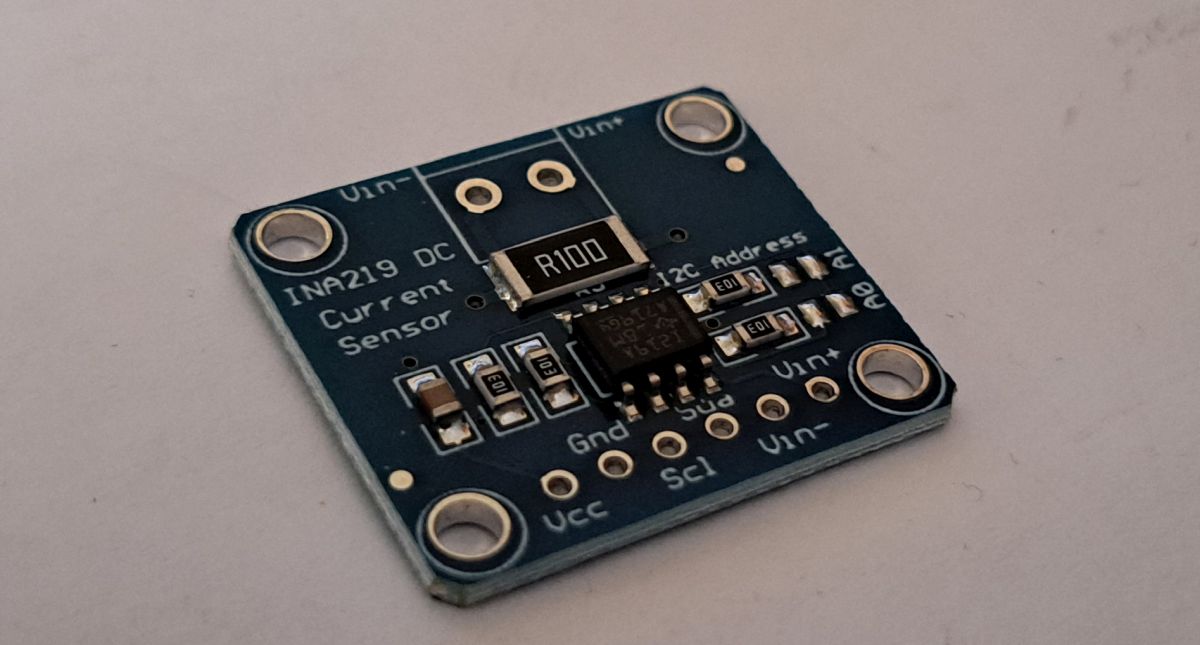
I²C Strom Sensor Board INA219
Der INA219 misst den Strom eines Verbrauchers und kann per I2C Bus ausgelesen werden. Ich habe diesen mal an einen ESP32 gehängt und versucht ihm ein paar Daten zu entlocken.
Weiterlesen
Der INA219 misst den Strom eines Verbrauchers und kann per I2C Bus ausgelesen werden. Ich habe diesen mal an einen ESP32 gehängt und versucht ihm ein paar Daten zu entlocken.
Weiterlesen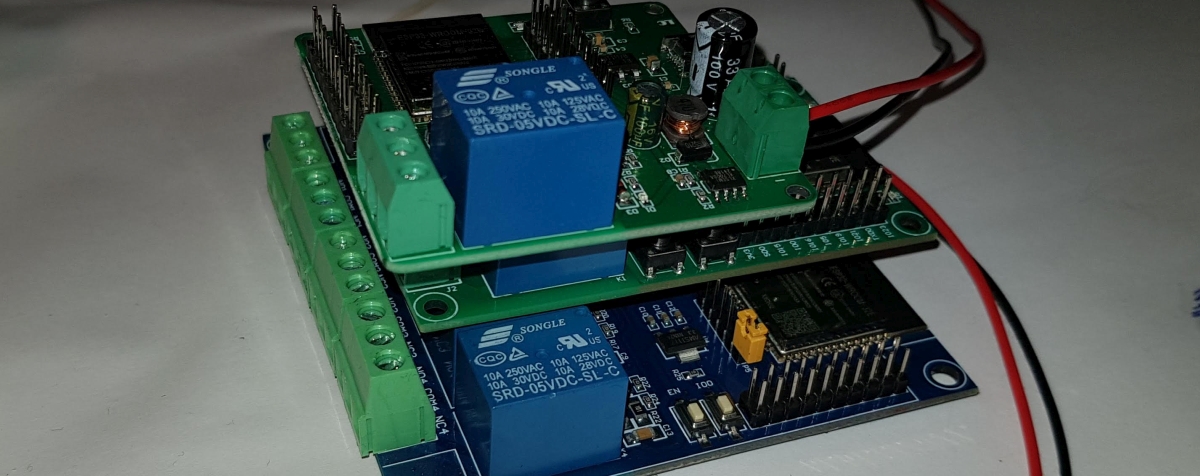
Für ein andere Projekt brauchte ich Relais um ein paar Pumpen schalten zu können. Hierbei sind die ES32 Platinen beim schnellen Ali aufgefallen. Dies kommen komplett verwendbar daher und haben zum Teil sogar einen 240V Stromversorgung mit on Board. ACHTUNG: Der Programmierport auf den Boards ist zwar mit 5V ausgewiesen, der Umstand dass meine Platienen …
Weiterlesen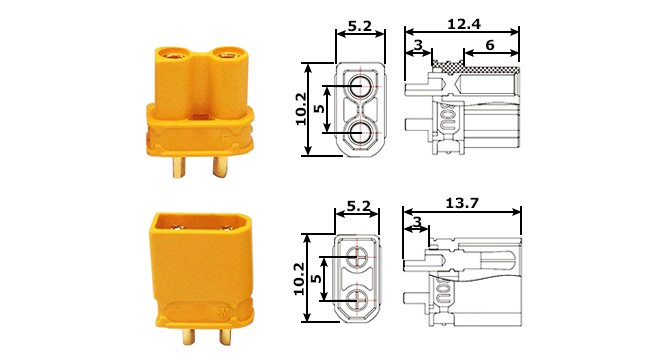
Steckverbinder der meist für die Stromversorgung im Modellbau verwendet wird
WeiterlesenHier soll kurz beschrieben werden ein Publisher (Nachrichten Erzeuger) und ein Subscriber (Nachrichten Abbonent) in C++ erstellt werden. Für eine ausführliche Anleitung sei auf die offizelle Website verwiesen. http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28c%2B%2B%29 Voraussetzung Ihr benötigt einen Workspace und ein Paket, in meinem Fall is das Workspace test_ws und Paket beginner_tutorial. Weiterhin könnten auch helfen: Vorbereitung Ins Paket Verzeichnis …
WeiterlesenJeder Knoten kann Services anbieten. Ein Service zeichnet sich durch eine Anfrage gefolgt von einer Anwort aus. Services werden verwendet um bestimmt funktionen in Knoten aufzurufen. Zum Beispiel um einen Zustand abzufragen oder um einen Reset durchzuführen. Die initative geht hierbei vom Anfragenden aus. Dies unterscheidet sich von den Nachrichten (Messages) die abboniert werden. Wie …
Weiterlesen
Ich habe mal angefangen mich mit ROS zu veschäftigen, irgendwann stösst man auf die Information das auch ohne physikalischen Roboter das Verhalten simulieren werden kann. Einwenig mehr in die Materie eingelesen fand ich mich vor zich Tutorials wieder die ich mit den dort vorhandenen Informationen nicht ausprobieren konnte. Somit stellt ich mir die Frage was …
Weiterlesen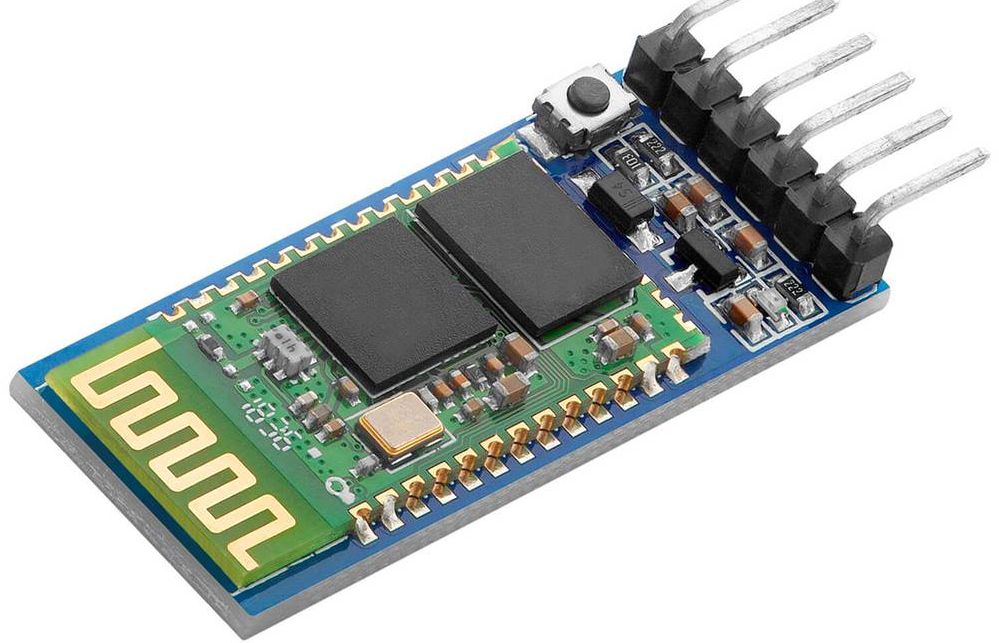
Diese Modul ist ähnlich dem HC05 und kann eine serielle Verbindung via Bluetooth herstellen. Die Logikein-/ausgänge arbeiten mit 3V das Modul kann also nicht direkt an Controllern mit 5V betrieben werden. Fakten Beschreibung Wert Versorgungsspannung 5-7V Logikspannung 3V Empfangspin RX Sendepin TX Boudrate (Einstellbar) 9600 Pin 1234 Details Anwendungsbereiche Fernsteuerung / Fernbedienung Kommunikation über kurze …
Weiterlesen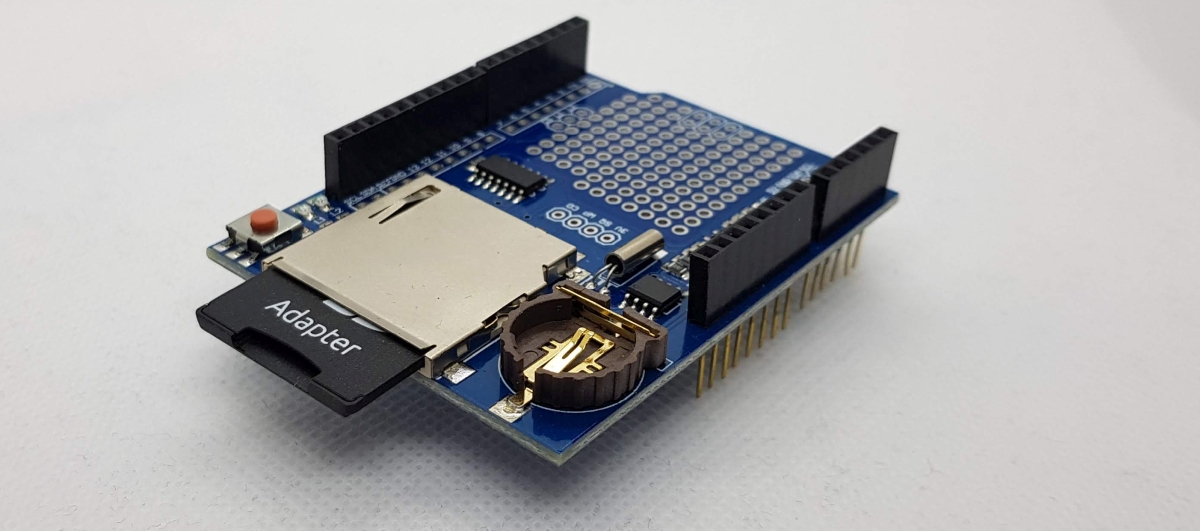
Manchmal benötigt man etwas mehr Speicher für seine Daten und was wenn jemand noch einen zuverlässigen Zeitstempel mit liefert. Dies alles … OK es sind nur zwei Funktionen … aber dies alles liefert die Daten Logger Zusatzplatine für den Arduino Uno und kompatible. Die Pins sind durchgeschleift, so dass mehrere Zusatzplatinen zusammen verwendet werden können. …
Weiterlesen
Eine weitere Zusatzplatine für den Arduino Uno und kompatible. Sie ist mit einem u Blox GPS chip ausgestattet. Zusätzlich besitzt sie einen Steckplatz für eine µSD Karte und bietet sich somit als GPS logger an. Die hier vorliegende Version 1.0 wurde breits durch eine Version 2 abgelöst. Die neu Version ist wegen des aktuellen Chipmangels …
Weiterlesen