Raspberry PI + Servo
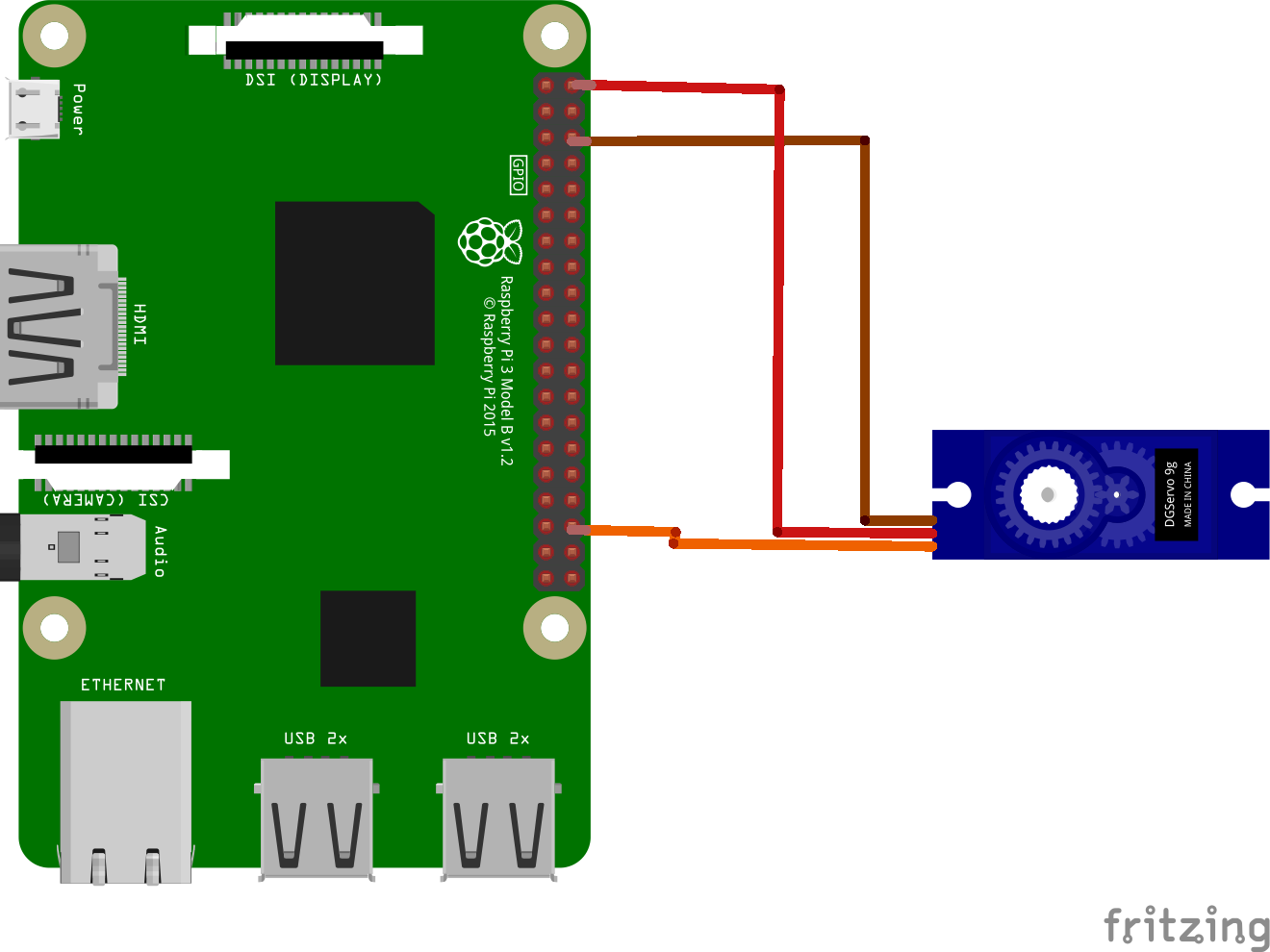
Ansteuerung eines Servos mit dem Raspberry PI 3. Hierbei geht es nur um die grundlegende Technik, der Einsatz könnte beispielsweise ein Mobiler Roboter sein. Der Servo soll hierbei über den Software PWM angesteuert werden um die Hardwar PWMs für andere Funktionen frei zu halten. Zusätzlich soll der Servo nicht wie üblich über Integer Werte gesteuert …
Weiterlesen