Raspberry Pi Mirror OS
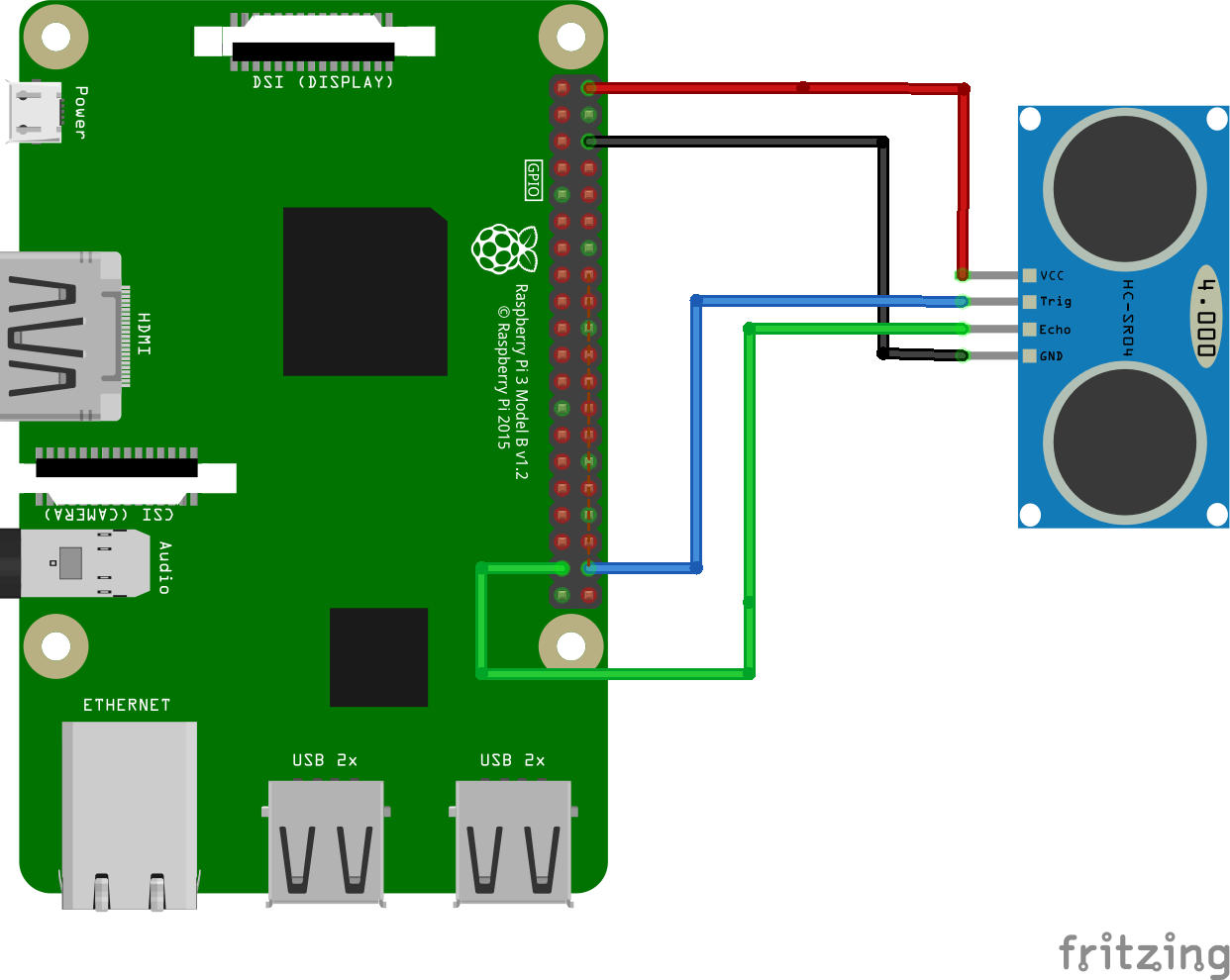
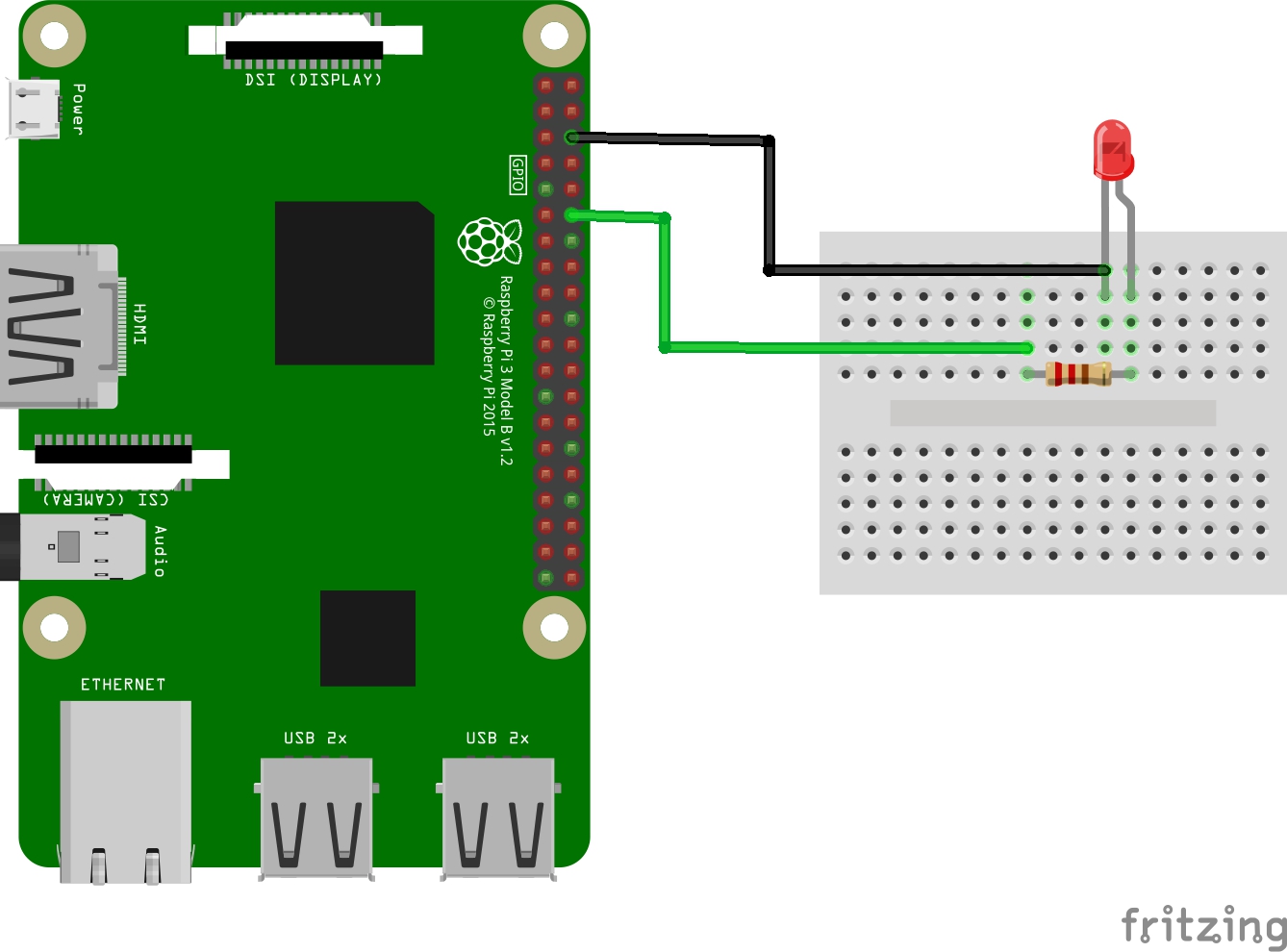
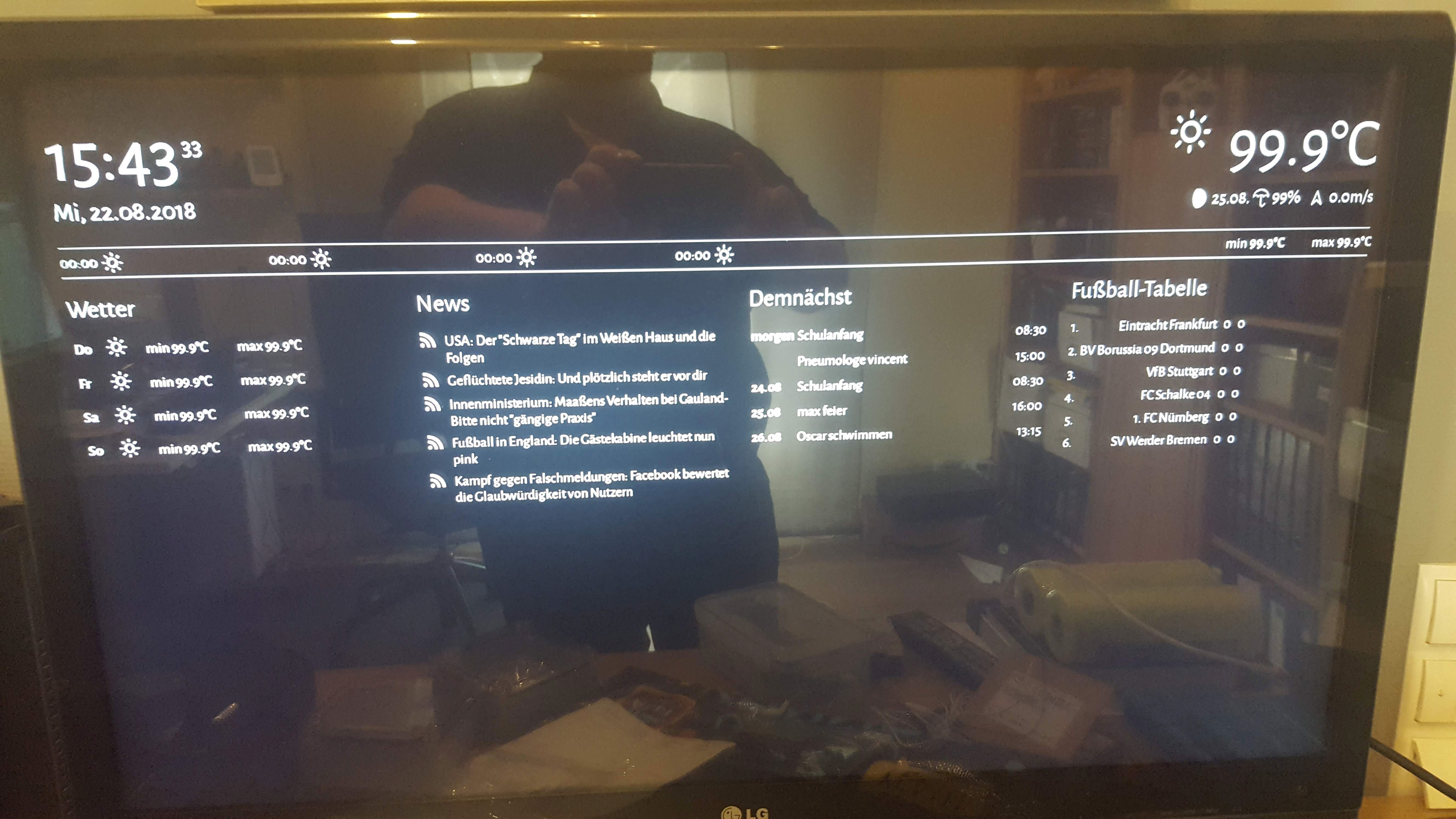
Kurzbeschreibung Mirror OS ist ein Betriebssystem, entwicket für smarte Spiegel. Dies sind Spiegel die eine Art Handy Funktionaltität bieten. Was wird gebraucht Vorkenntnisse mit dem Raspberry Pi und Linux können nicht schaden ;). Auch hilft es sicherlich schon mal SSH verwendet zu haben. Ansonsten braucht ihr folgendes. Hardware Ich habe noch einen Pi B+ V1.2 …
Weiterlesen