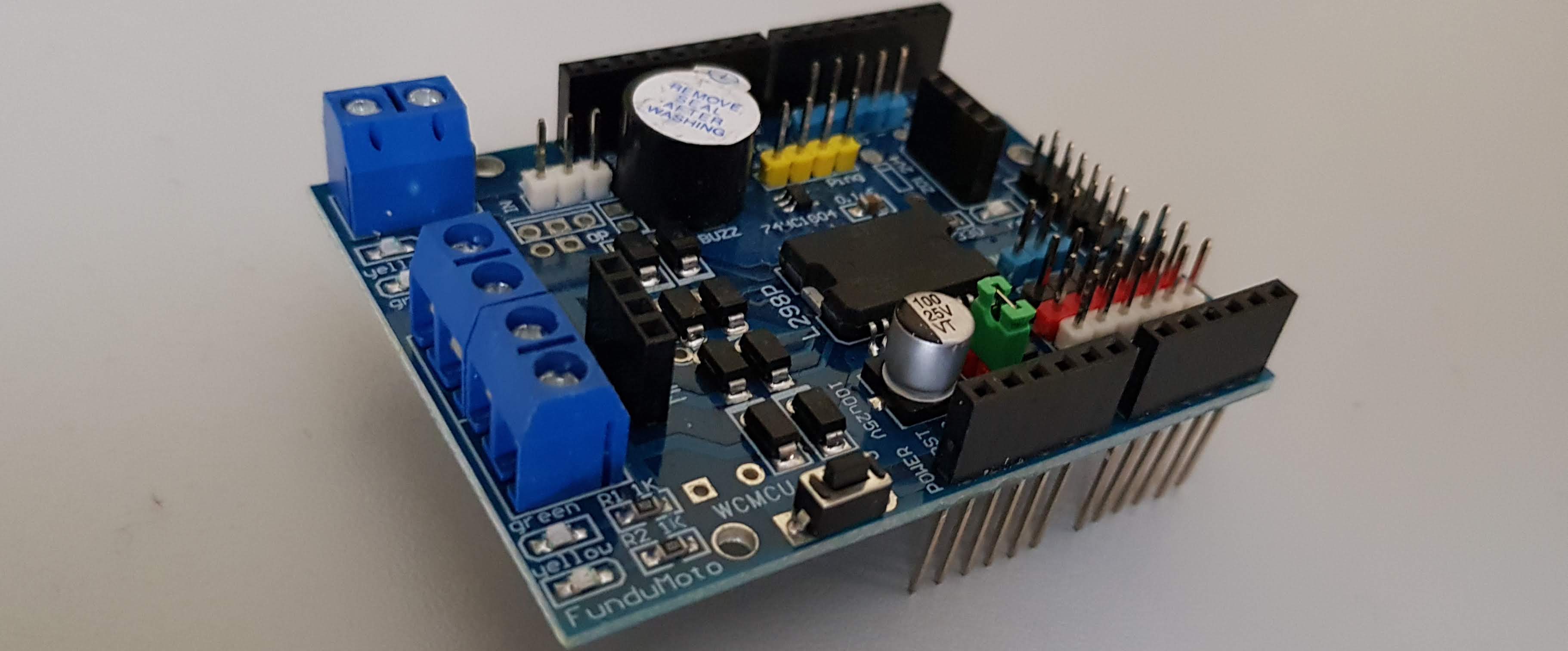
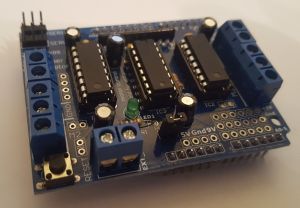
Preview – Arduino Motor Shield mit L298P
Mal wieder ein Motor Shield beim schnellen Ali gefunden, dieser besitzt einen eine L298 Motorbrücke. Interessant hier ist dass die Bremsfunktion und Strommessung herausgeführt sind. Was ist ein Preview: Da ich immer mehr den Überblick über die bestellte Hardware verliere, werde ich nach der Bestellung eine kleine Vorschau schreiben. Wenn ich dann zu der Hardware …
Weiterlesen