Sunflower
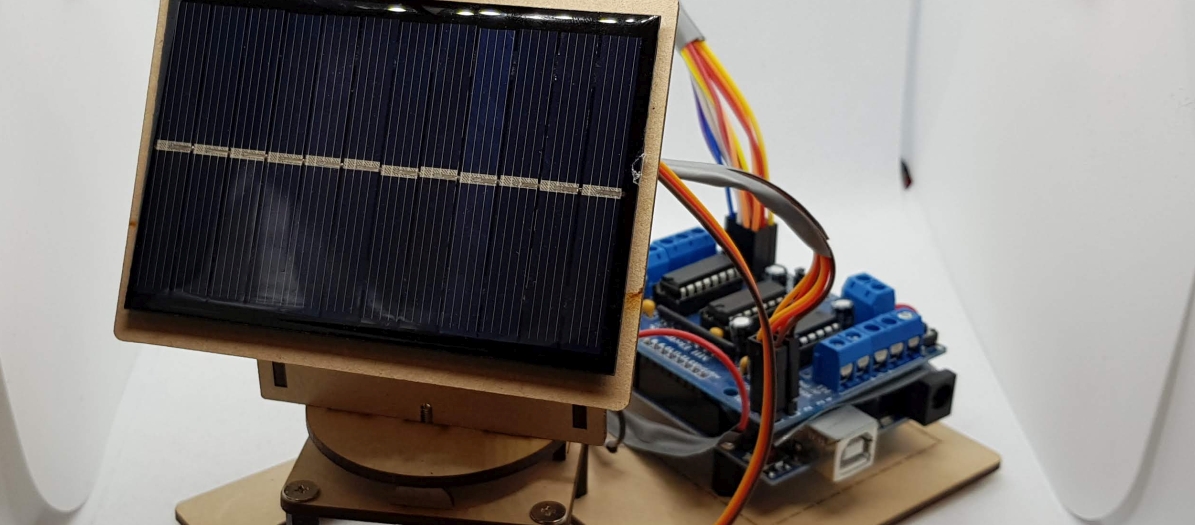
Wie die Sonnenblume reckt das folgende Projekt seine Blüte (Solarpannel) nach der Sonne. Ein lasergeschnitzter Holzrahmen mit einwenig Technik und schon hat man ein Projekt das nicht nur Kinder begeistert. Das Modell ist unter dem Begriff „Arduino Intelligent Solar Tracking“ beim schnellen Ali für rund 25-50€ zu finden. Nach kurzer Recherche im Internet fand ich …
Weiterlesen