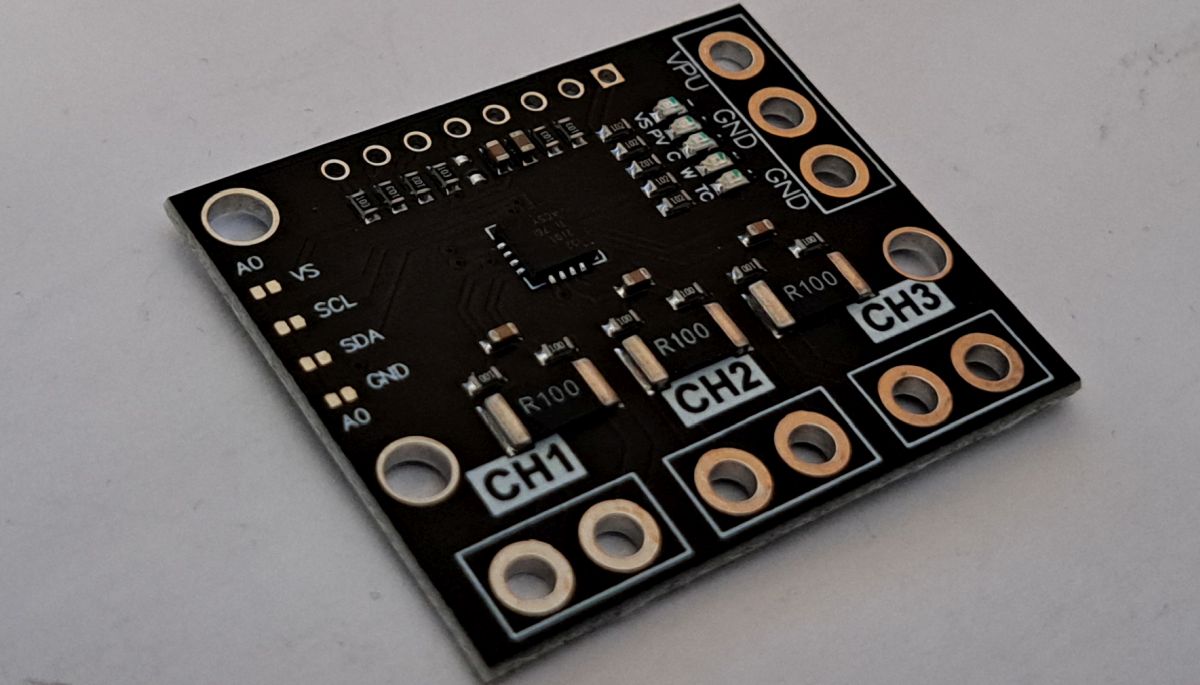
Preview – INA3221 Power Monitor
Dreikanal Shunt Wiederstands Messungen sind mit dem INA3211möglich. Ausgelesen werden können die Werte über den I²C Bus.
Weiterlesen
Dreikanal Shunt Wiederstands Messungen sind mit dem INA3211möglich. Ausgelesen werden können die Werte über den I²C Bus.
Weiterlesen
Je nach Version kann der Sensor 1-20 KG wiegen und an einen Mircrocontroller übermitteln. Der Sensor selbst besteht aus einem Aluminium Korpus unD einem Dehnungsmesstreifen. Es git unter dem Begriff HX711 entsprechende Bibliotheken bei Arduino und Github (Sieh Quellen). Was ist ein Preview: Da ich immer mehr den Überblick über die bestellte Hardware verliere, werde …
Weiterlesen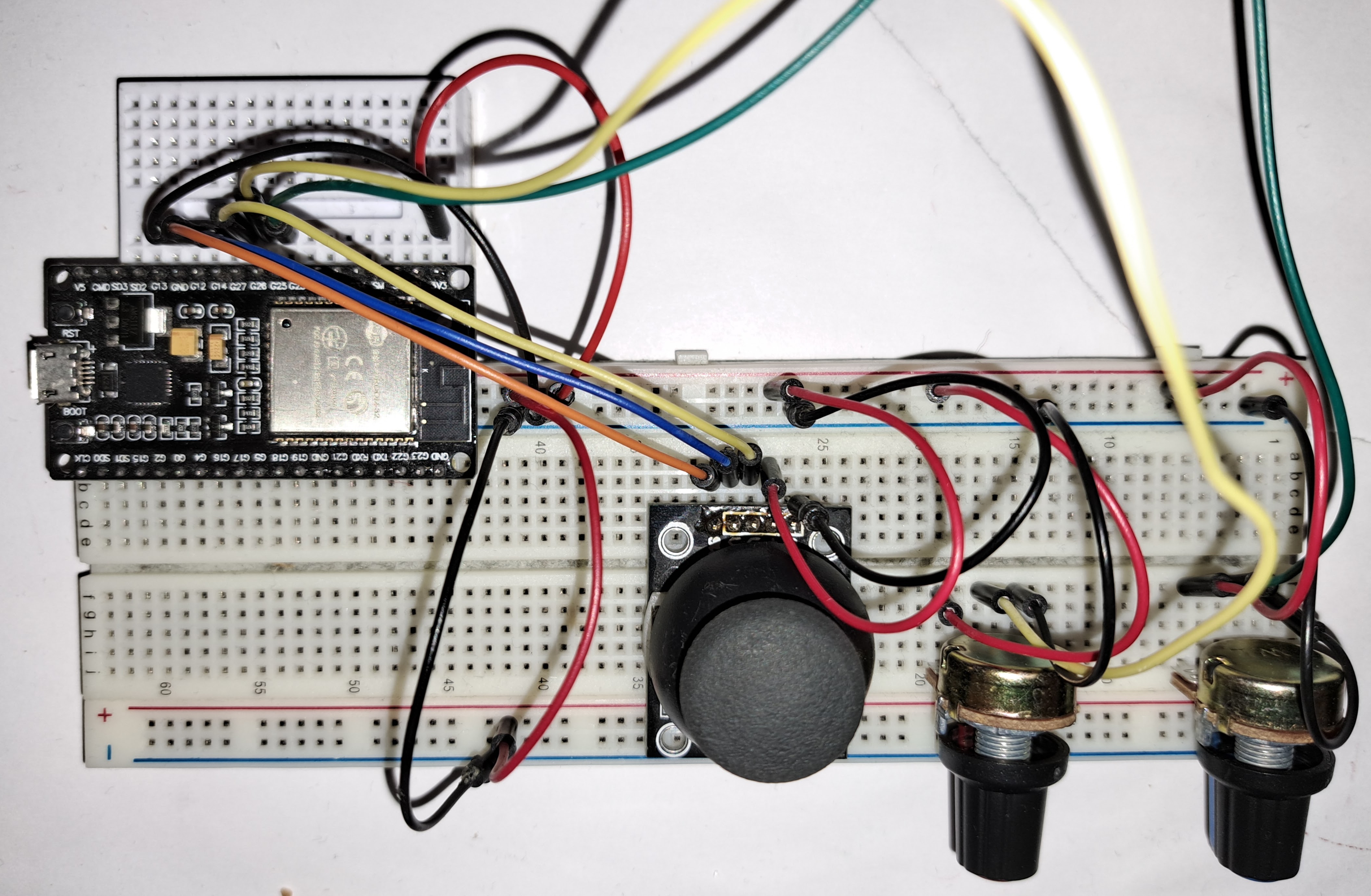
Manchmal braucht es eine Fernbedienung oder ein Joystick um ein Projekt zu Testen oder einfach Spaß zu haben. Im Folgenden wird die Anbindung eines ESP32 über BlueTooth beschrieben.
Weiterlesen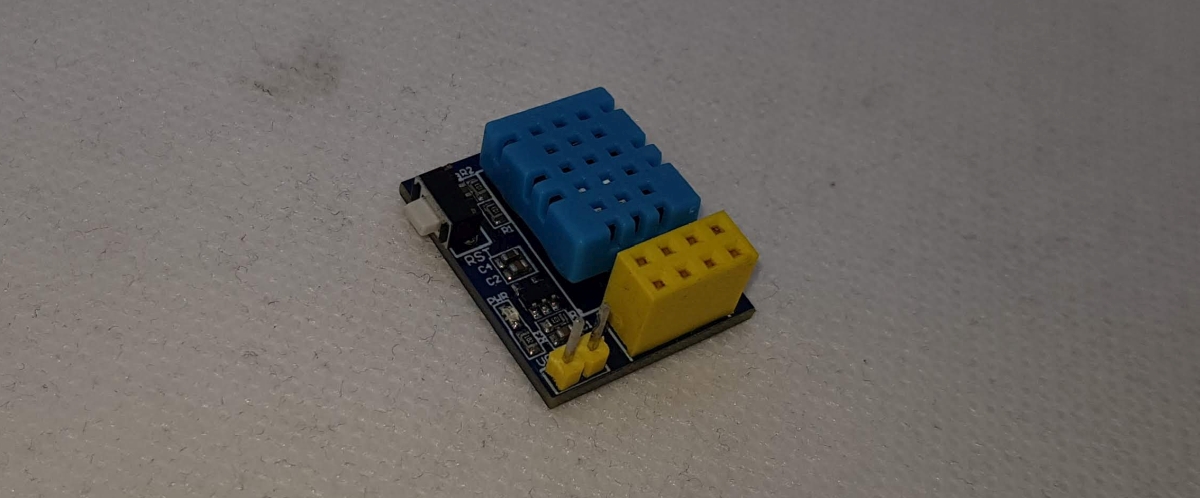
Kleine Platine mit einem Steckplatz für den ESP01(s) und einem DTH11 Sensor. Fakten Beschreibung Wert Boud-Rate 115200 (evtl. auch 9800, bei mir waren es die 11) Steckplatz ESP01 1 Sensor DHT11 Sensor Pin 2 Versorgungsspannung 3,7 – 12V Taster Reset Grundsätzliche Daten Anwendungsbereiche Ansichten Programmierung Bibliotheken Sensor Hier gibt es vielfältige Implementierungen, es ist auch …
Weiterlesen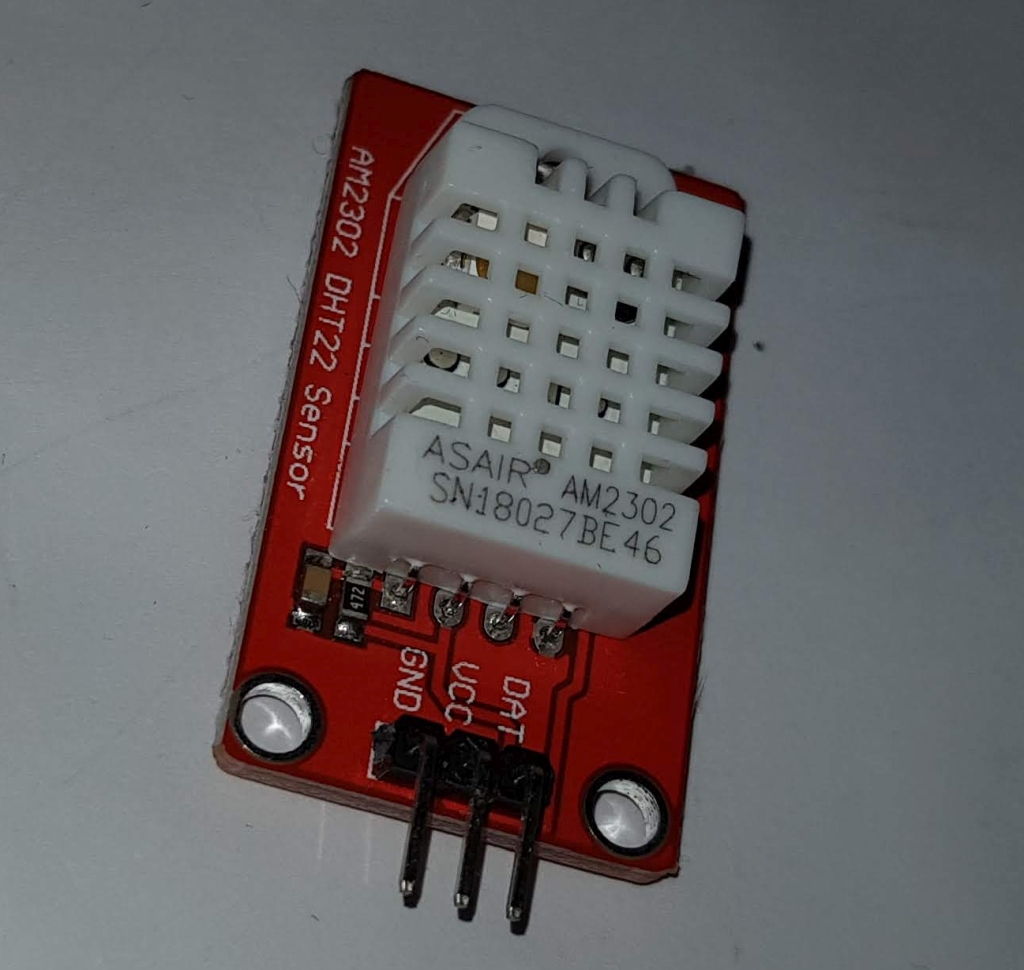
Der DHT kann die Luftfeuchtigkeit mit einer Genauigkeit von 2%RH und die Temperatur mit einer Genauigkeit von +/-0,5°C messen. Ausgegeben werden dei Werte auf dem OneWire Bus.
Weiterlesen
Manchmal hat man bereits eine Gleichstromquelle aber nicht die richtige Spannung, dieser Spannungswandler löst das Problem. Ich habe 5 Stück für rund 10€ beim den Amzonen gekauft. Fakten Ansichten Fazit Die Ausgangsspannung muss über den kleinen Poti eingestellt werde, hierzu benötigt man ein Messgerät um die Ausgangspannung erfassen zu können. Ich habe den Wandler mit …
Weiterlesen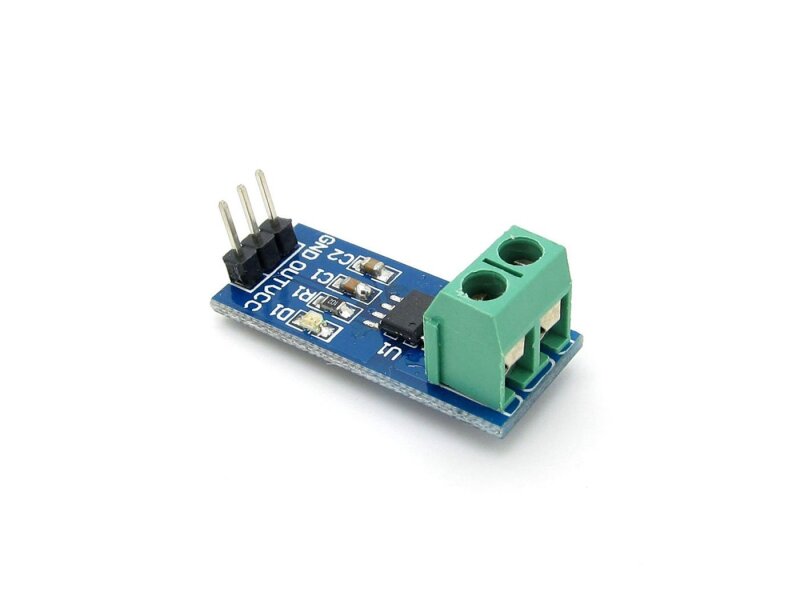
Der ACS712 ermöglicht es, angeschlossen an einen Microcontroller, den Strom zu messen. Den Chip gibt es mit einer kleinen Schaltung fertig auf Platine. Es gibt diese in verschiedenen Varianten abhänger von der maximal zu messenden Stromstärke (5,20,30 Ampere). Die gemessene Stromstärke wird in eine proportionale Spannung umgewandelt und an einem Pin ausgegeben. Dieser kann über …
Weiterlesen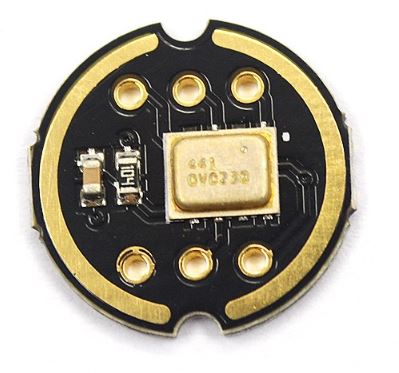
INMP441 wenn man den Angaben glauben kann hochpräzises Mikrofon für den I²C Bus. Für rund 3€ auf den einschlägigen Plattformen. Was ist ein Preview: Da ich immer mehr den Überblick über die bestellte Hardware verliere, werde ich nach der Bestellung eine kleine Vorschau schreiben. Wenn ich dann zu der Hardware komme werde ich das ensprechende …
Weiterlesen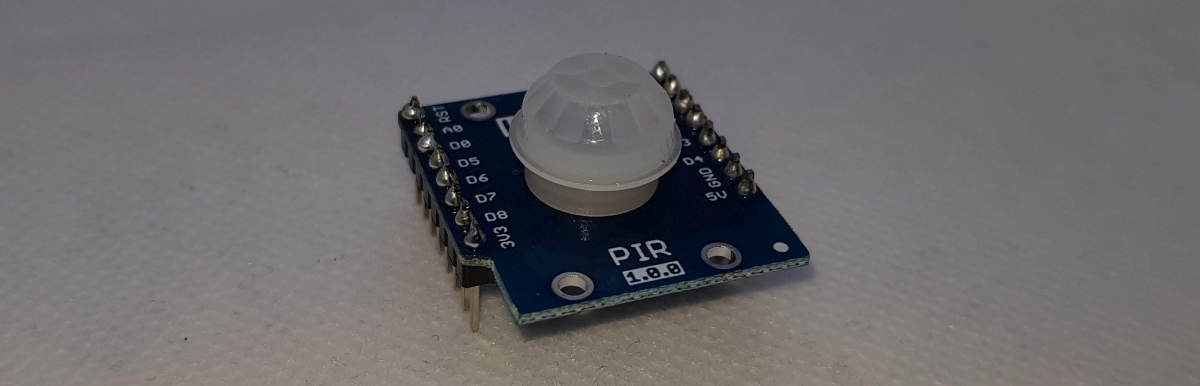
Diese Zusatzplatine hat eine kleinen Bewegungssensor on Board. Der Sensor hat eine leichte Verzögerung und ist bei Auslieferung mit dem D3 Pin des D1 Mini verbunden. Fakten Bewegungssensor Pin-Auswahl per Lötbrücke auf Rückseite möglich Beschriebung Name D1 ESP32 S2 C3 Bewegung registriert Data D3 (Voreingetstellt) 17 18 7 Eingebaute LED LED 2 2 2 7! …
Weiterlesen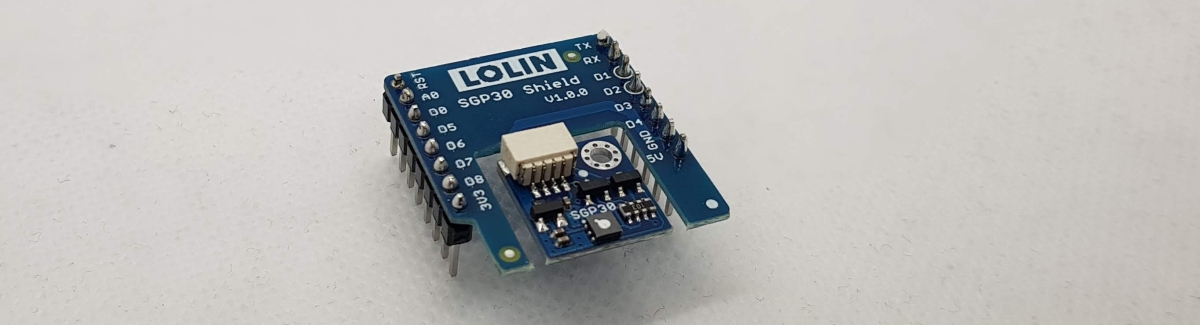
Diese Sensorplatine besitzt einen SG30 Sensor welcher Organische Verbindungen und H2 in der luft detektiert und daraus den CO2 Wert errechnen kann (kein echter CO2 Sensor) Fakten I2C Interface TVOC Messung: 0-60000 ppb eCO2 Messung: 400-60000 ppm Sensor kann aus Platine gebrochen und über Buchse betrieben werden Φ2mm Befestigungslöcher Beschriebung Name D1 ESP32 S2 C3 …
Weiterlesen