Last Updated on 26. März 2022 by sfambach
Ich habe für 89€ (diesmal direkt bei Amazon) ein Roboter Chassis erstanden. Dieses besitzt drei omnidirektionale Räder. In diesem Bericht zeige ich den Zusammenbau und nenne noch ein paar Fakten. Die Verwendung des Chassis folgt in späteren Berichten.
(Vom Hersteller gibt es ein Montage Video, dieses habe ich unten gelinkt)
Fakten
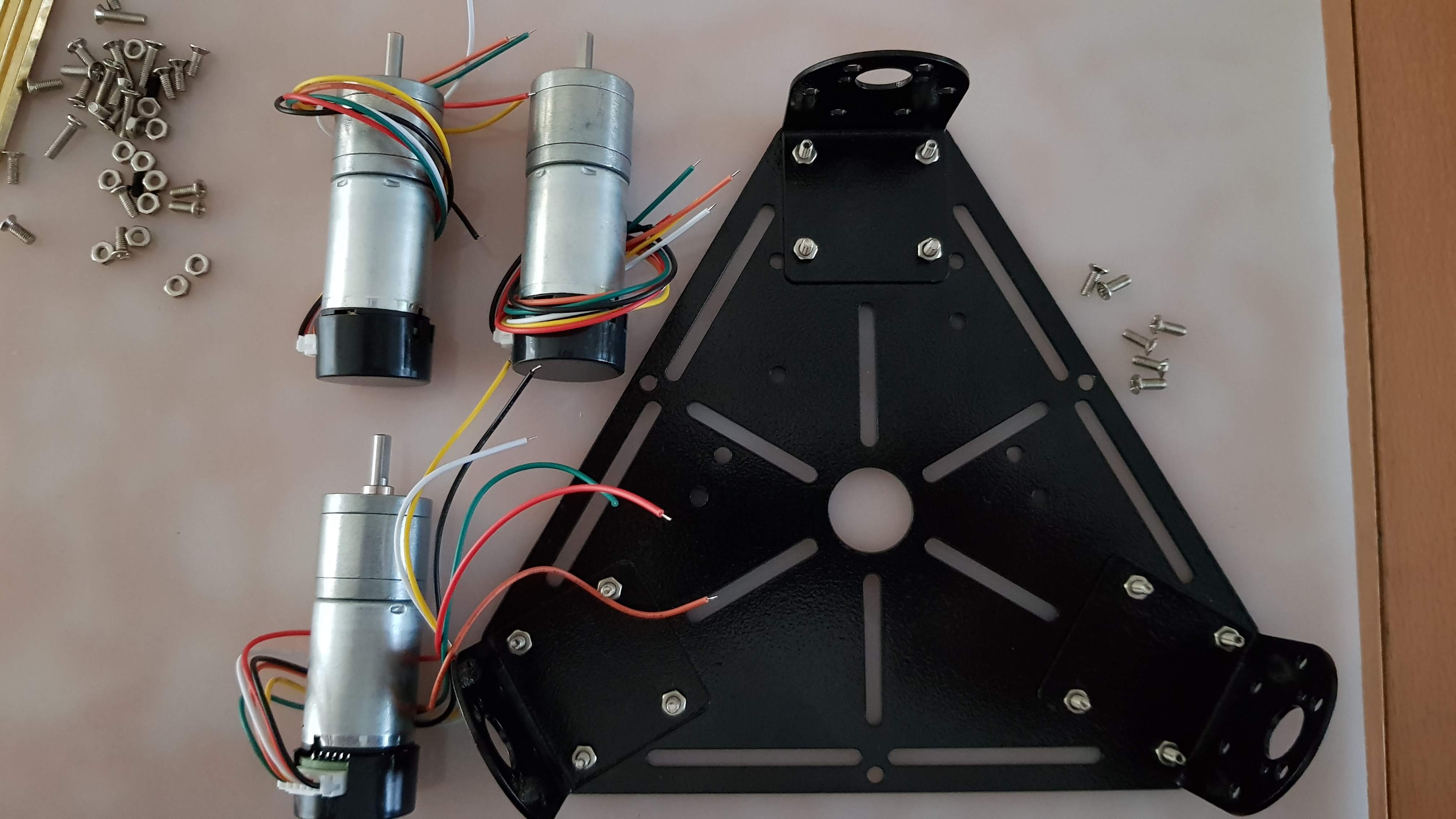
Bestandteile
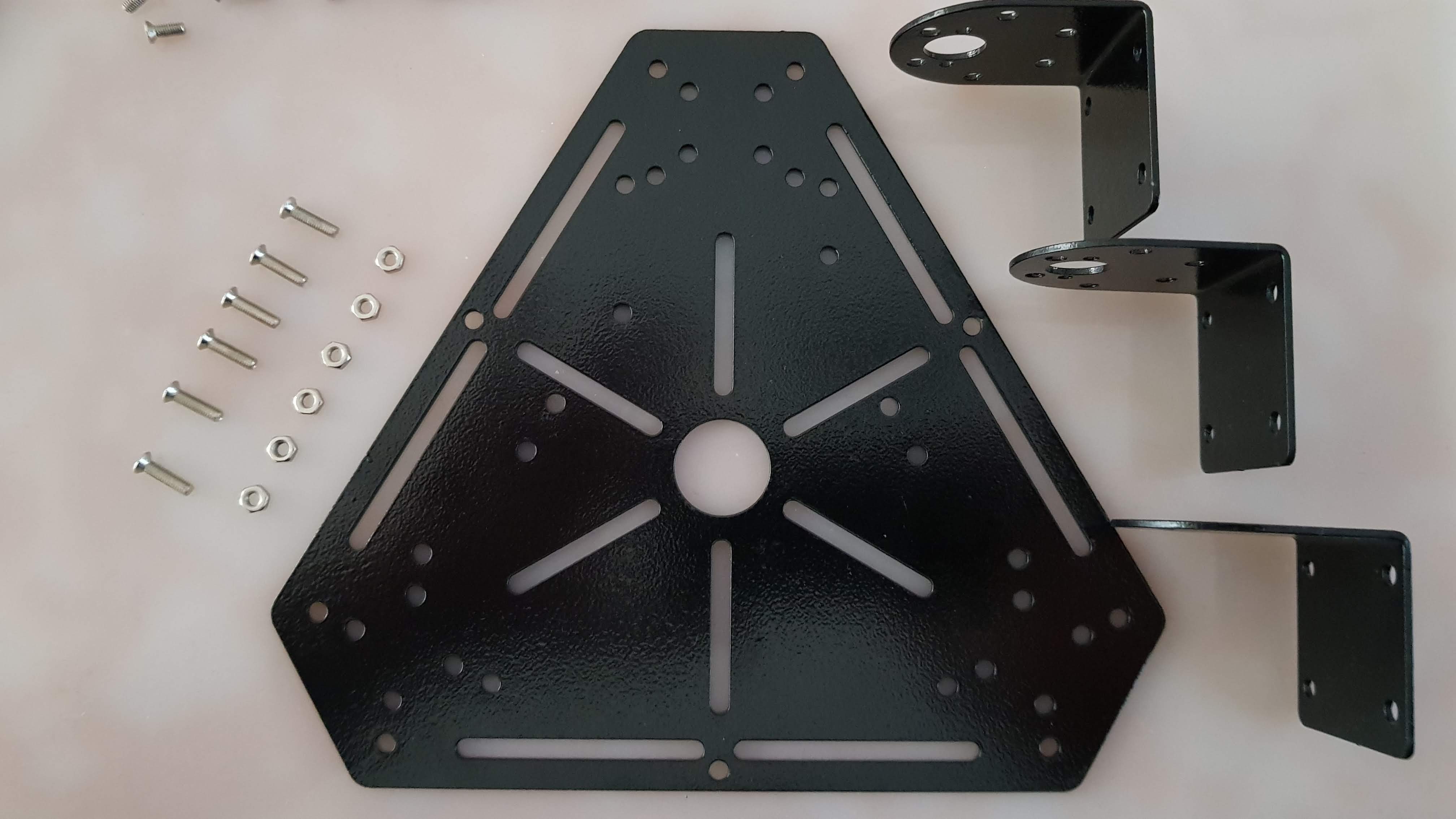
- Stabile Platform aus Metall
- Drei Getriebemortoren mit Hal Senosor
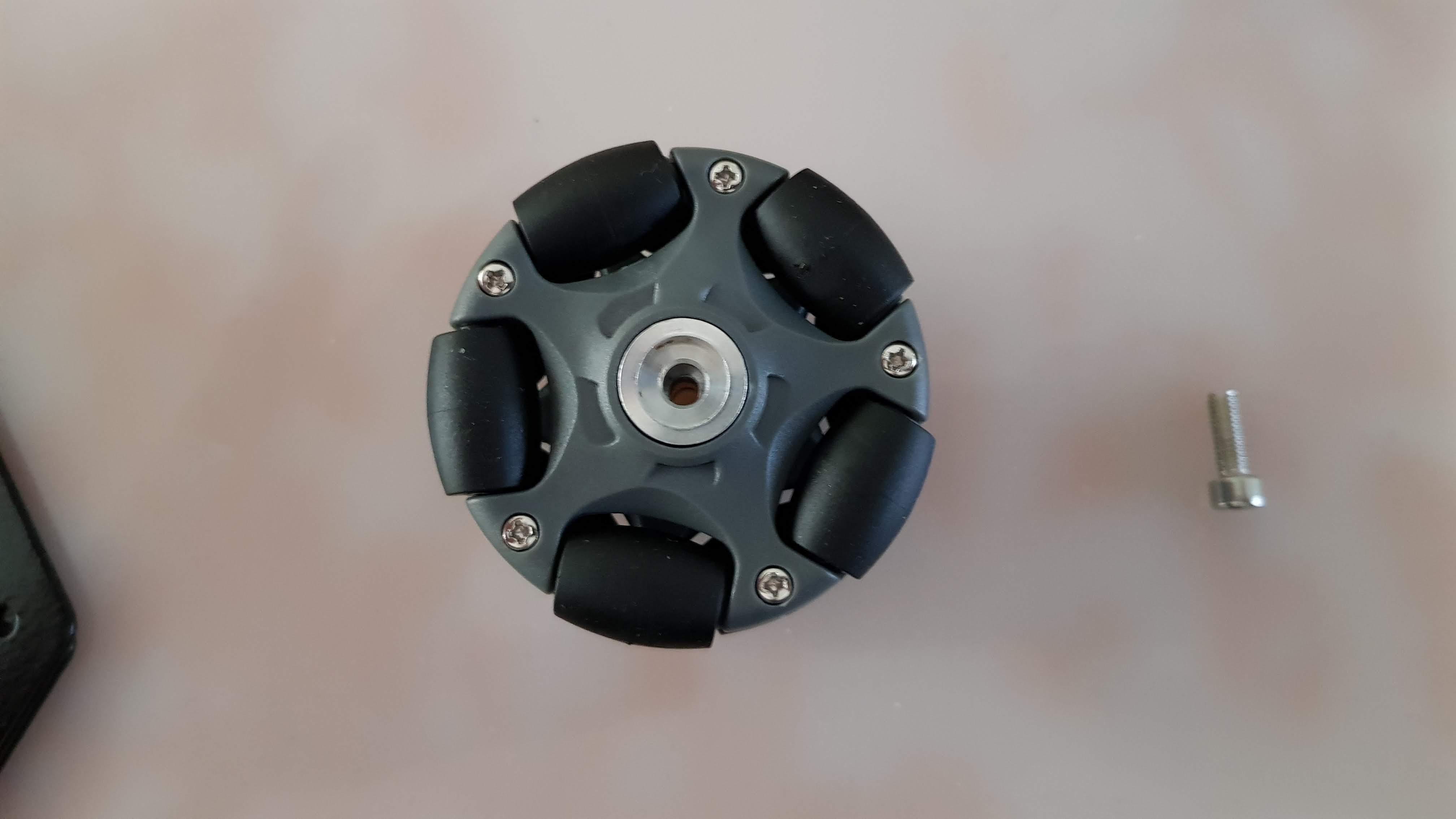
- Drei omnidirektionale Räder
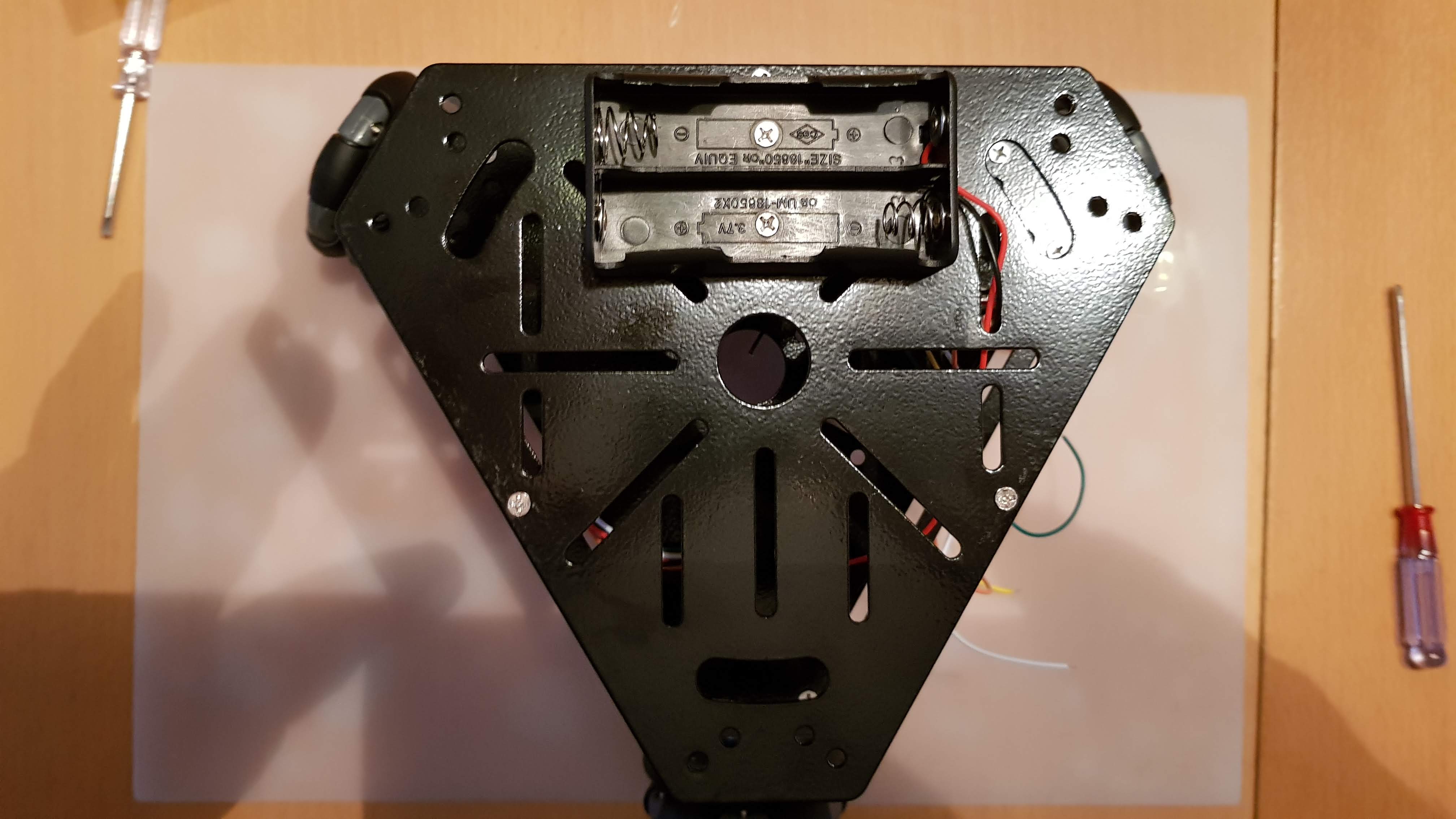
- Ein Batteriefach für 18650 Industrie Akkus
- Diverse Schrauben + 3 Imbus Schlüssel
- Geschwindigkeit: 20m / min
- Last: 2kg
- Maximal zulässiger Gradient: 40 Grad ?(was auch immer das bedeuten mag)
- Produktfarbe: schwarz
- DIY-Installationszeit: ca. 15 Minuten (Ich habe etwas länger gebraucht wegen der Fotos)
- Produktgröße: 14 * 14 * 11.5cm
- Verpackungsgröße: 27 * 18 * 5,5 cm
- Gesamtgewicht: 1155 g
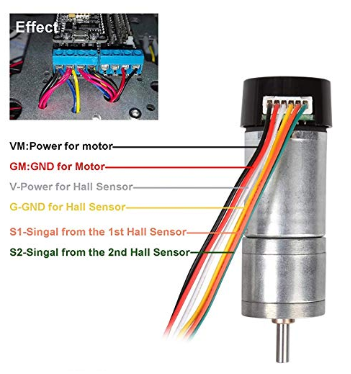
Die Motoren
- Hall Sensor DC 5V
- Motorspannung: DC 9V
- Leerlaufstrom: ≤200mA
- Laststrom: max. 1,2A
- Motordrehzahl: Leerlauf 150 U / min – Last 100 U / min / min
Anwendungsbereiche
- Labor versuche (Räder sind nur auf glatten, geraden flächen gut)
- Als Spielzeug für die Kinder 😉
- Autonomes Fahren mit allen Einschränkungen …
Aufbau
Auspacken
Der Bausatz kam gut Verpackt und schnell bei mir an.



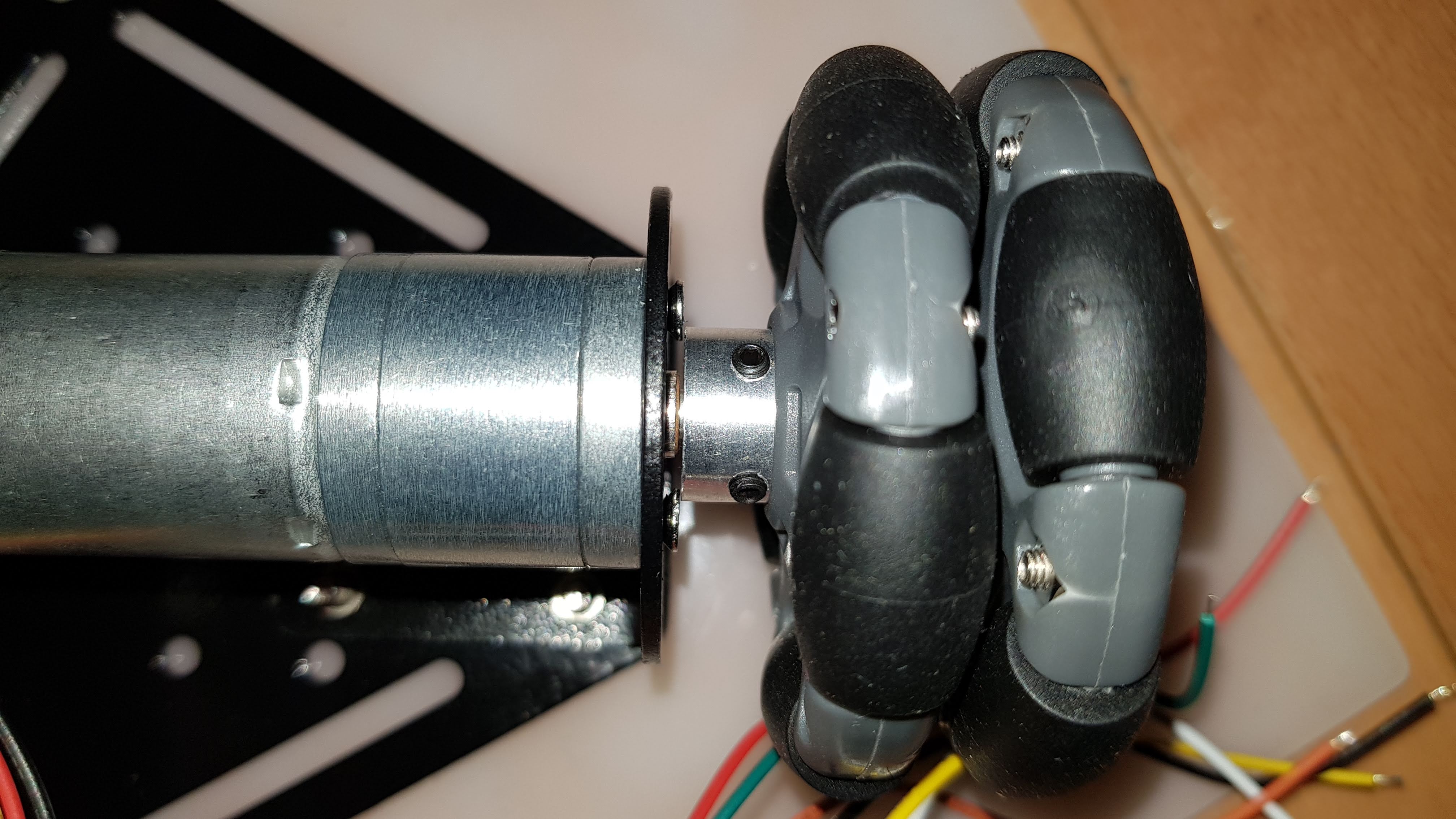
Räder vorbereiten
Das Omnirad ist schon zusammengebaut es muss nur noch die Aufnahme für die Achse eingesetzt und festgeschraubt werden. Hier erstmal die Bestandteile ohne Madenschrauben:









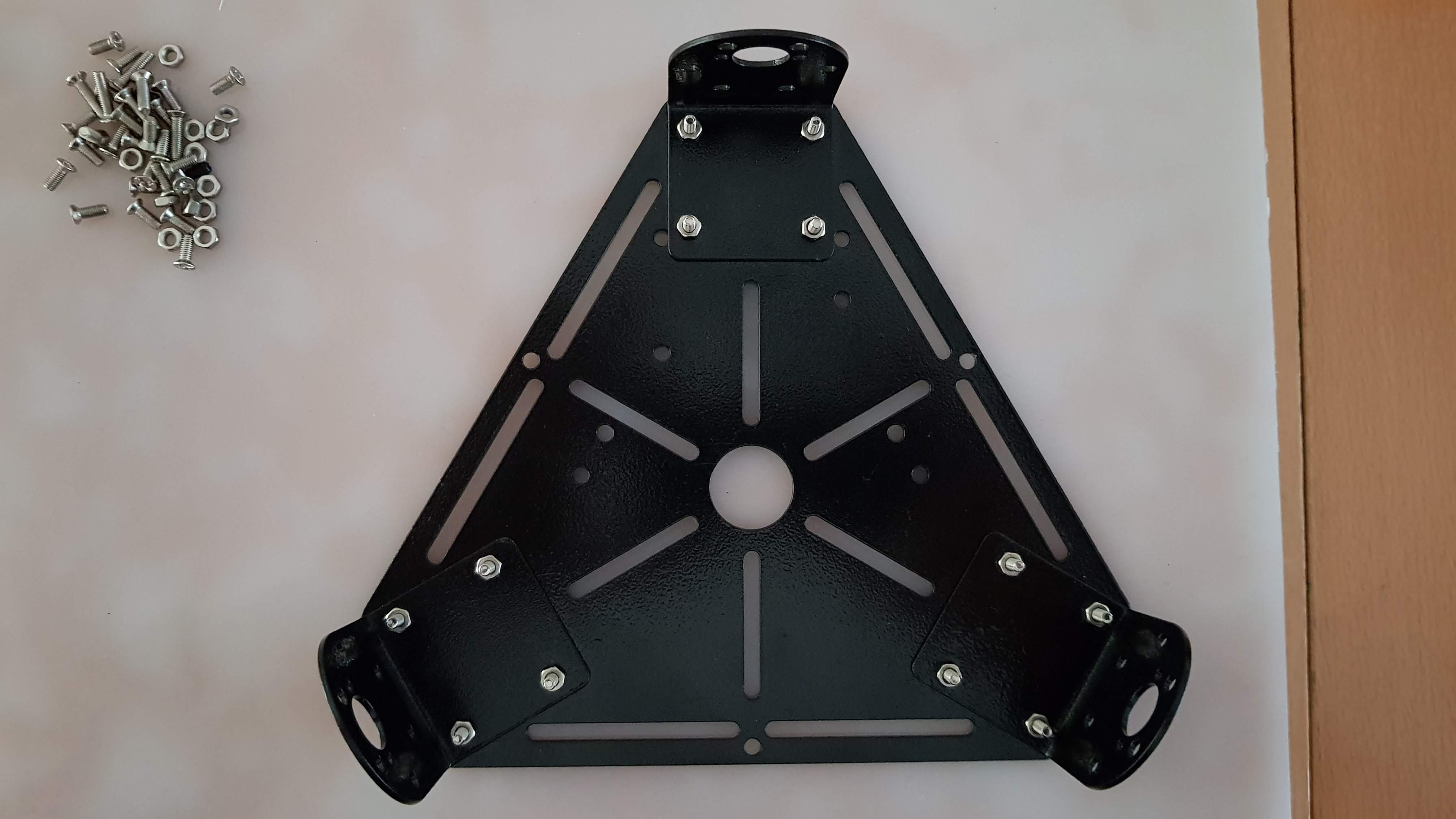
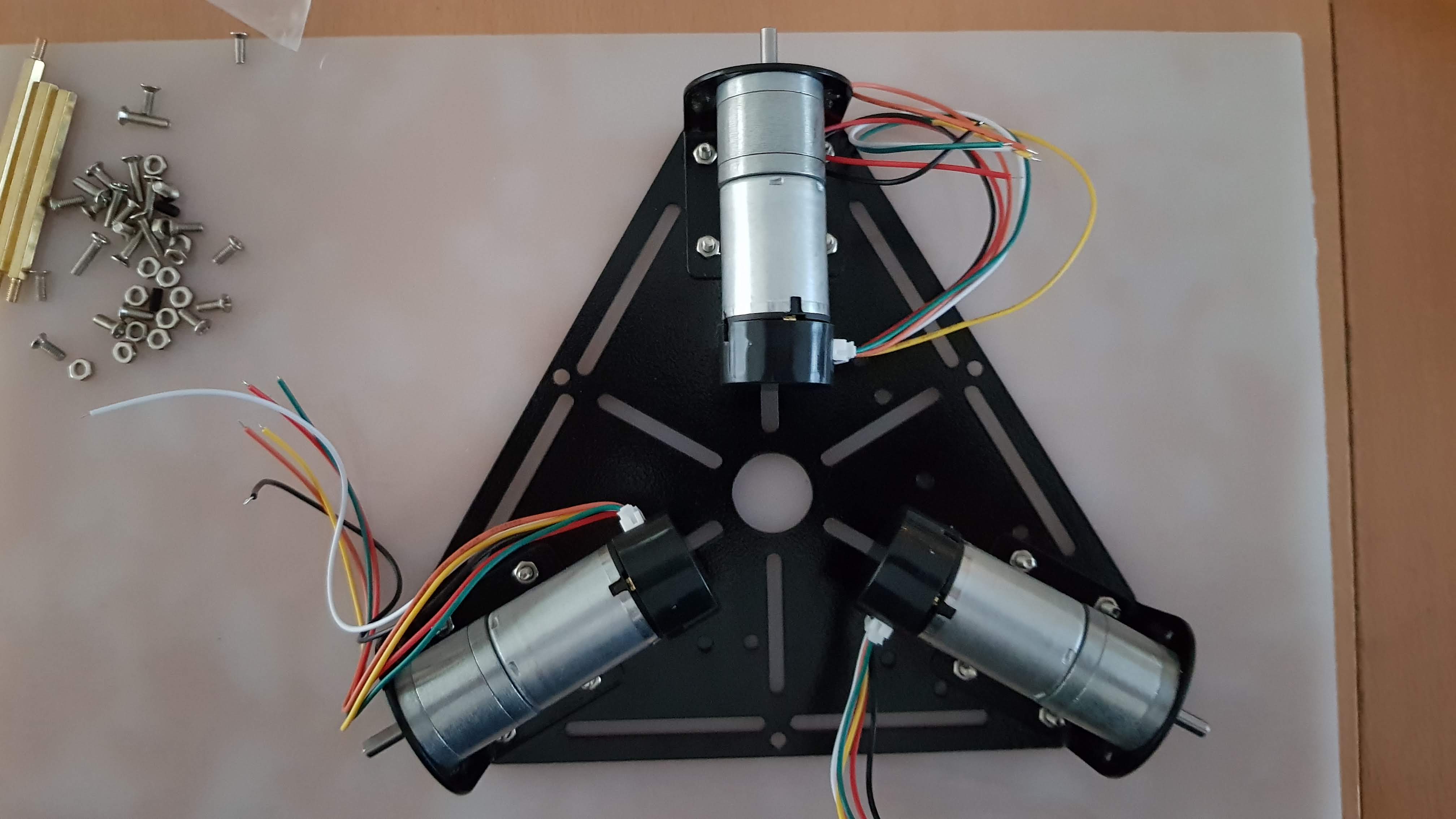
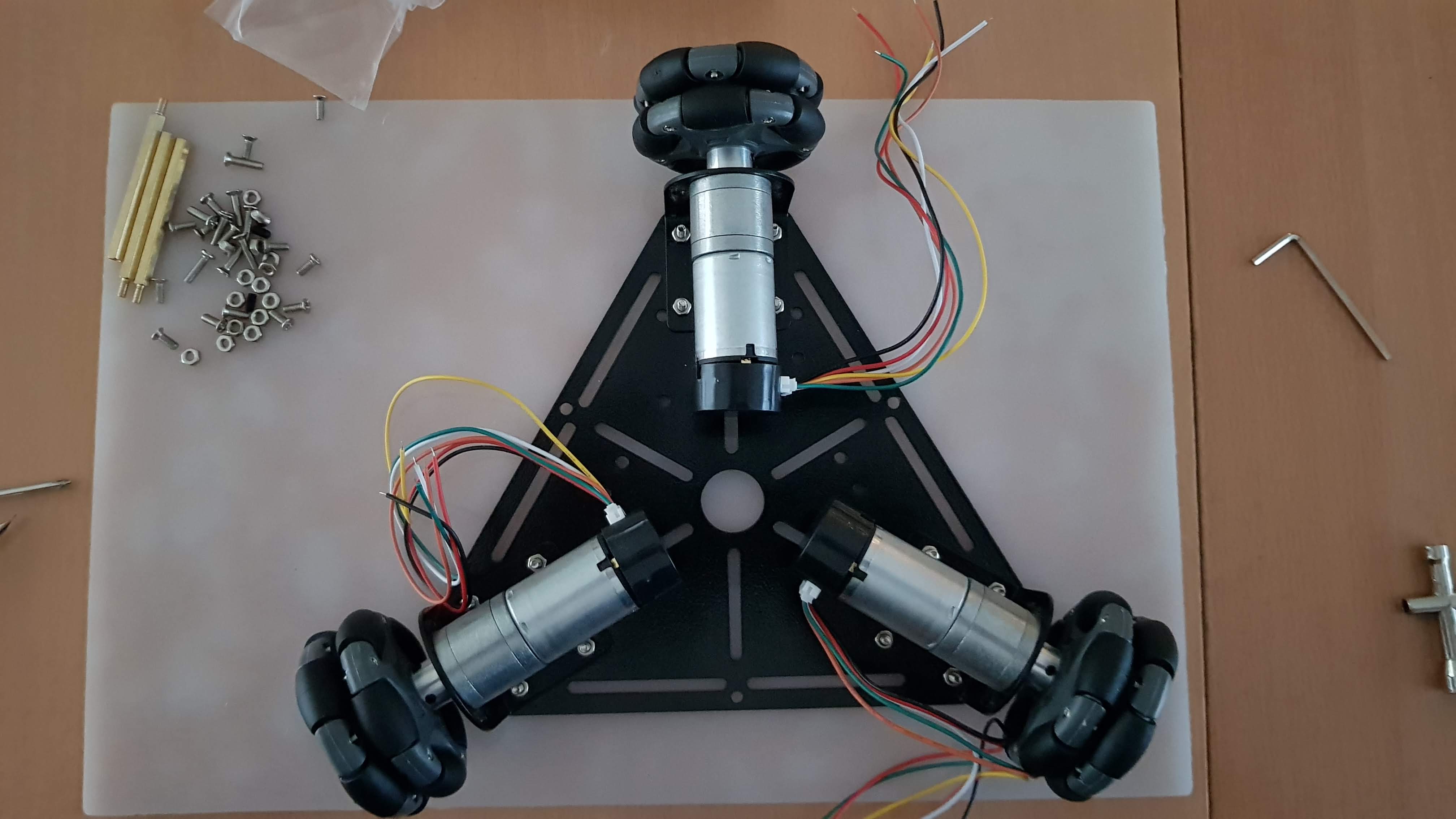
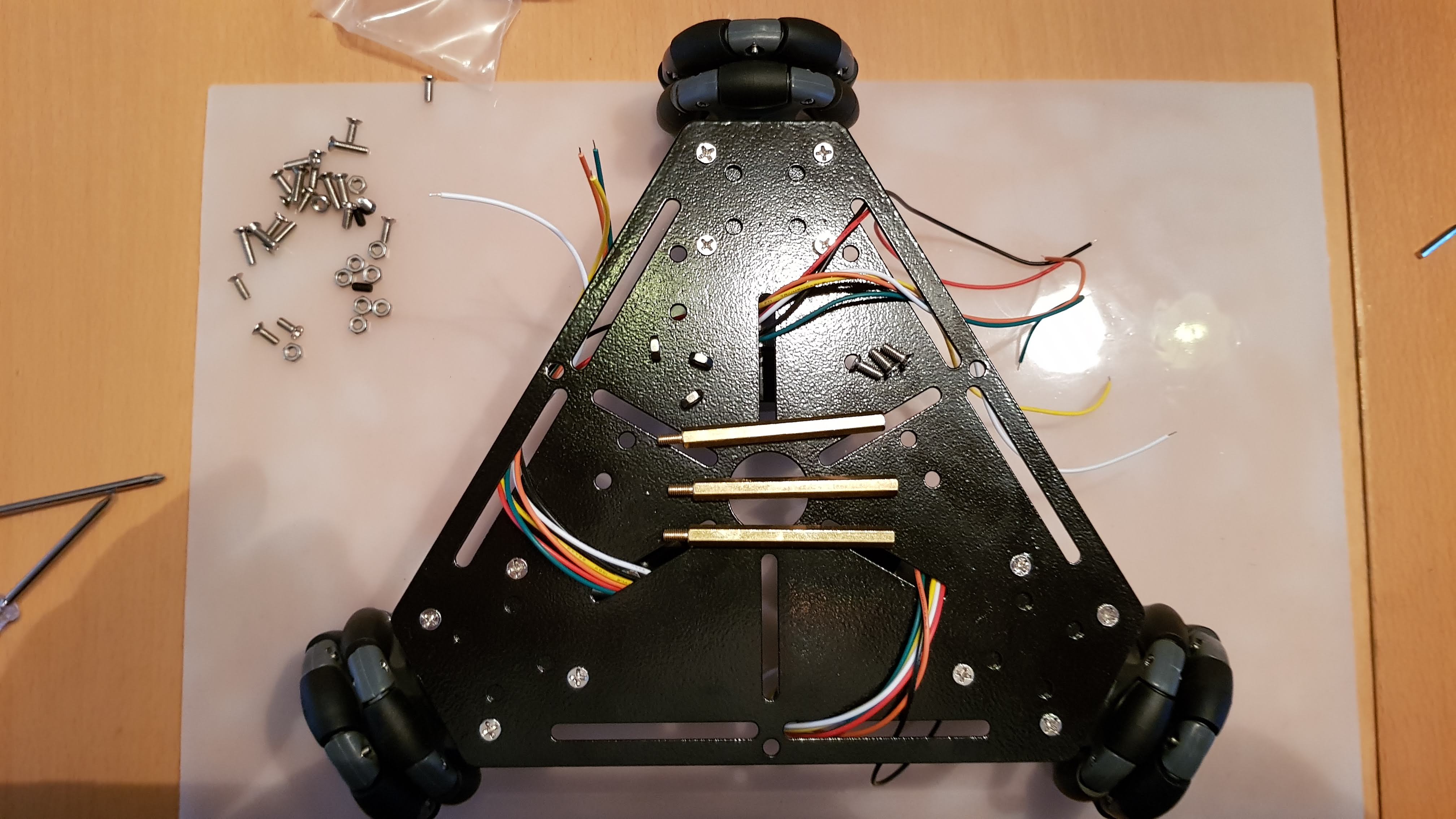
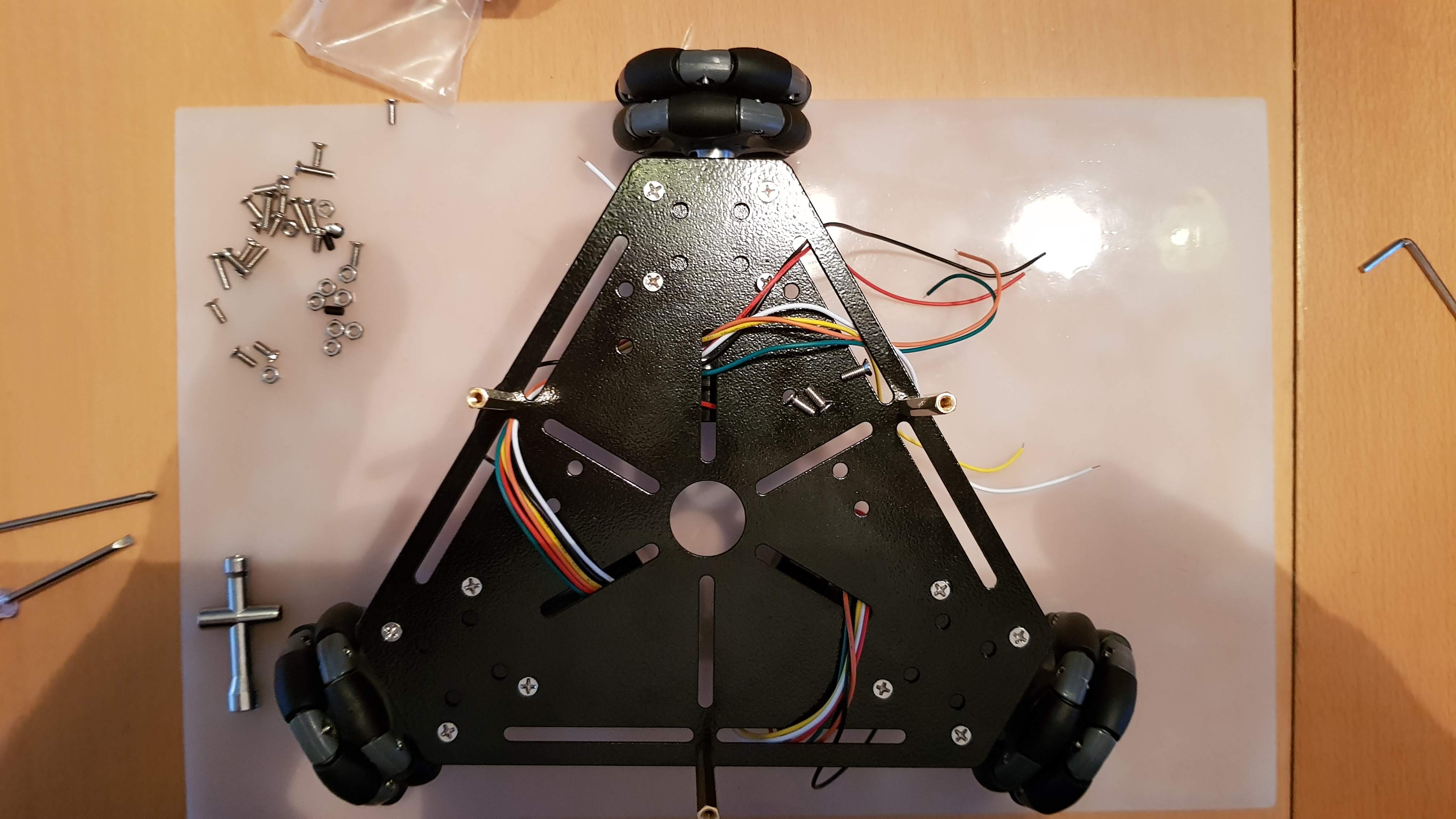
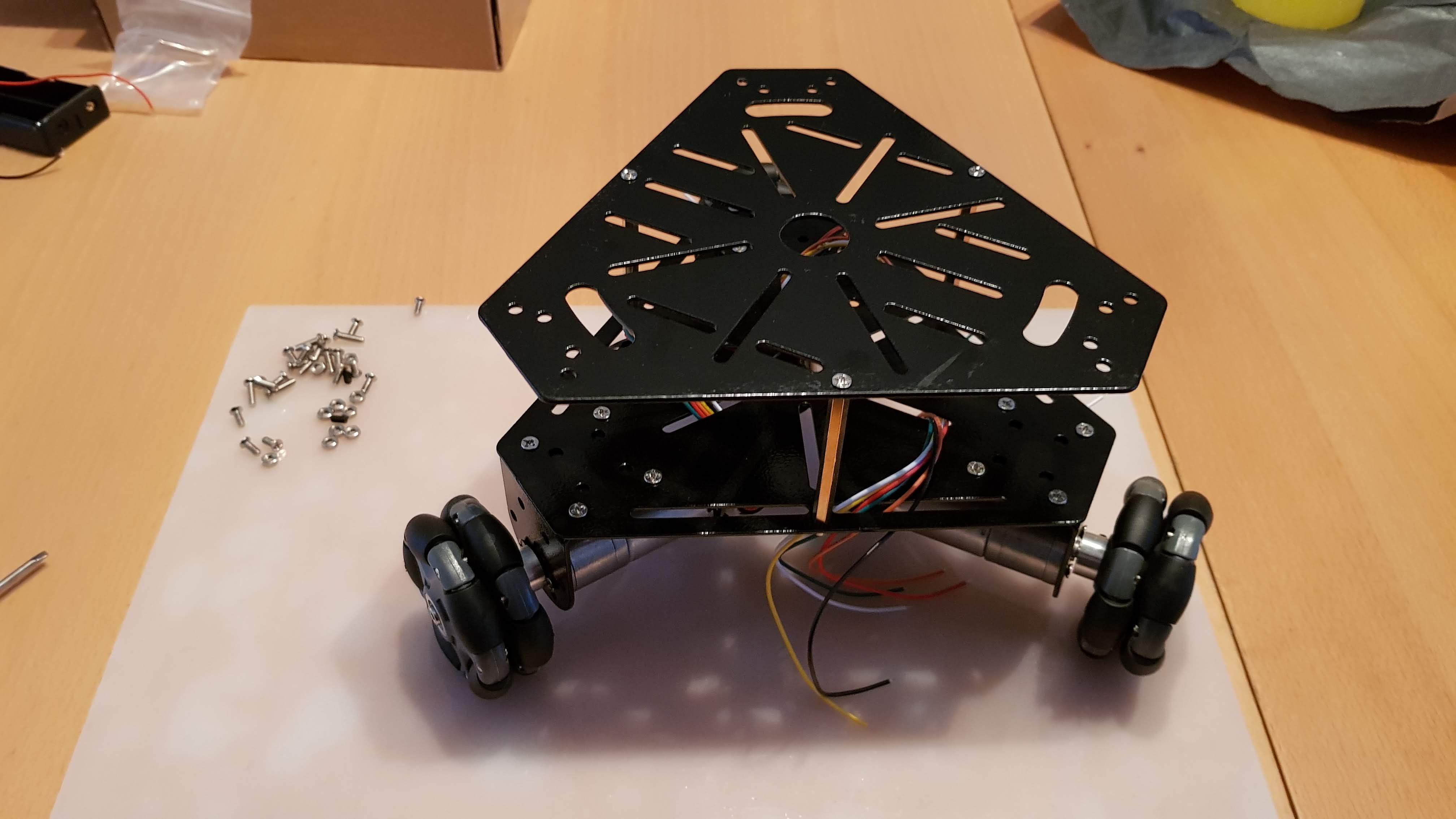
Gehäuse Zusammenbauen


Fazit
Der Bausatz ist schnell zusammengebaut. Alle Formen und Löcher passen perfekt. Der schnelle Zusammenbau wird zusätzlich durch die mitgelieferte Anleitung und das verfügbare Video auf YouTube beschleunigt.
Was fehlt ist eine Beschreibung und ein Belegungsplan für die Motoren. Es hat etwas Zeit gedauert die richtige Belegung zu finden, da hier anscheinend kein Standard existiert.
Das Chassis und die Motoren wirken sehr stabil, ich bin schon gespannt auf die Inbetriebnahme.
Verwandte Beiträge
Quellen
https://en.wikipedia.org/wiki/Killough_platform
https://makezine.com/projects/make-40/kiwi/
https://github.com/WickedDevice/OmniWheelControl/