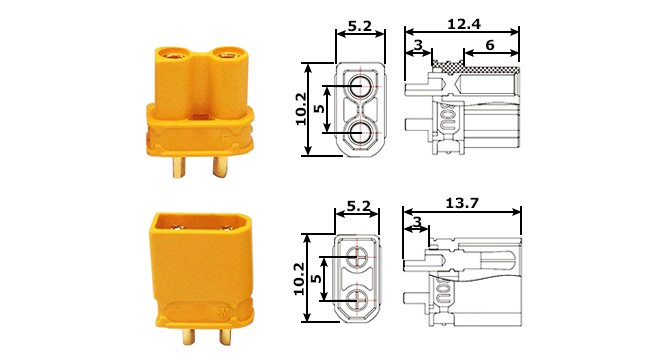
XT Steckverbinder
Steckverbinder der meist für die Stromversorgung im Modellbau verwendet wird
Weiterlesen
Steckverbinder der meist für die Stromversorgung im Modellbau verwendet wird
Weiterlesen
Manchmal hat man bereits eine Gleichstromquelle aber nicht die richtige Spannung, dieser Spannungswandler löst das Problem. Ich habe 5 Stück für rund 10€ beim den Amzonen gekauft. Fakten Ansichten Fazit Die Ausgangsspannung muss über den kleinen Poti eingestellt werde, hierzu benötigt man ein Messgerät um die Ausgangspannung erfassen zu können. Ich habe den Wandler mit …
Weiterlesen
Hardcodierte SSIDs und WLan Passwörter im Arduinocode sind keine schöne Sache. Die WLan Credentials auf der Console eingeben ist nicht mehr zeitgemäß, schon garnicht wenn man keine Consolen Verbindung hat. Da wäre es doch schön eine allgemeine Lösung zu haben, die es Ermöglicht IoT-Geräte einfach ins eigene WLAN zu bekommen ohne im Code schon etwas …
Weiterlesen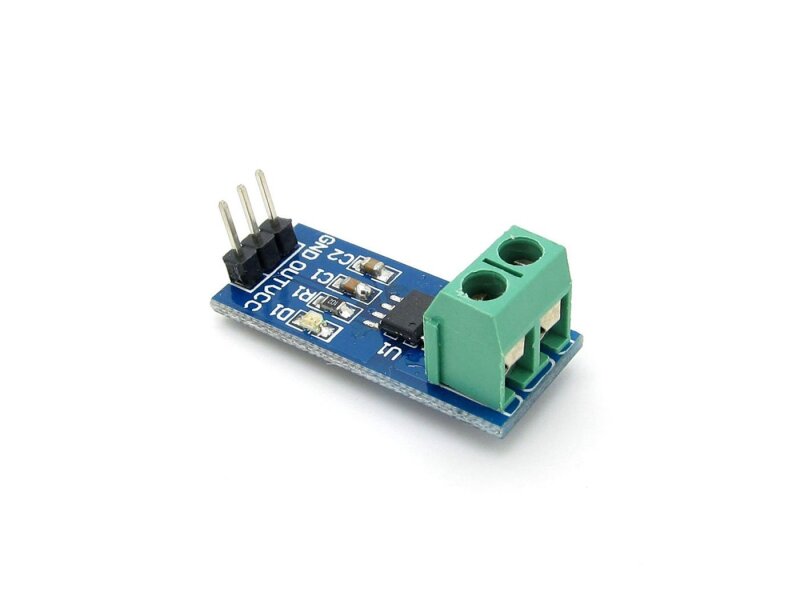
Der ACS712 ermöglicht es, angeschlossen an einen Microcontroller, den Strom zu messen. Den Chip gibt es mit einer kleinen Schaltung fertig auf Platine. Es gibt diese in verschiedenen Varianten abhänger von der maximal zu messenden Stromstärke (5,20,30 Ampere). Die gemessene Stromstärke wird in eine proportionale Spannung umgewandelt und an einem Pin ausgegeben. Dieser kann über …
Weiterlesen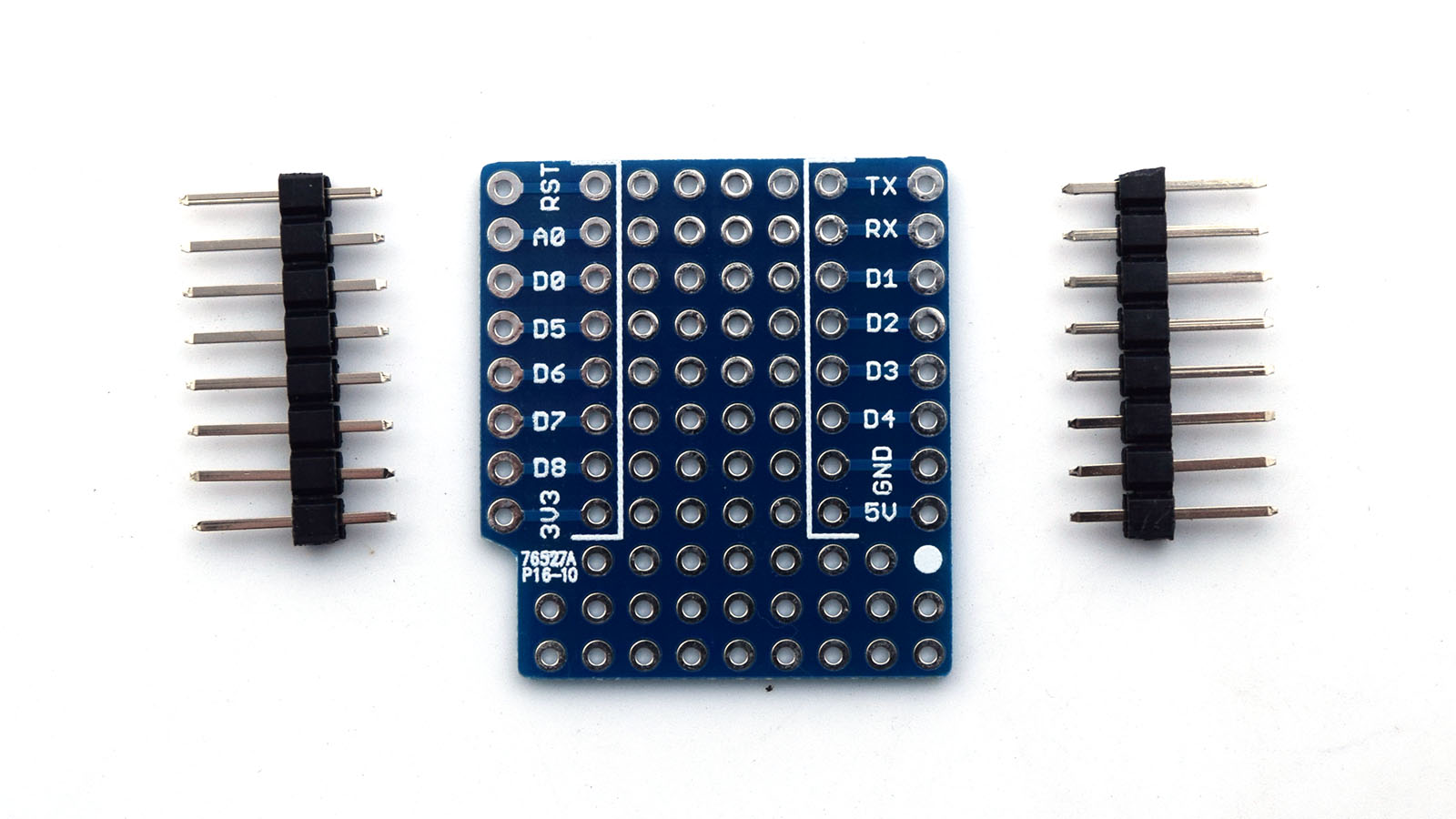
Kleine Prototyp-Platine passend zu der D1 Mini Serie. Fakten Kompatibilität D1 Typ Kompatibel Begründung wenn nicht D1 mini Ja D1 mini Pro Ja D1 mini Lite Ja D1 32 Ja S2 mini Ja C3 Ja Kompatiblität zu den D1 Boards Anwendungsbereiche Ansichten Programmierung Bibliotheken Arduino ESP32 Bibliothek V2.0.2 Arduion ESP8266 Bibliothek V3.0.2 Testprogramm Die Platine …
WeiterlesenHier soll kurz beschrieben werden ein Publisher (Nachrichten Erzeuger) und ein Subscriber (Nachrichten Abbonent) in C++ erstellt werden. Für eine ausführliche Anleitung sei auf die offizelle Website verwiesen. http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28c%2B%2B%29 Voraussetzung Ihr benötigt einen Workspace und ein Paket, in meinem Fall is das Workspace test_ws und Paket beginner_tutorial. Weiterhin könnten auch helfen: Vorbereitung Ins Paket Verzeichnis …
WeiterlesenJeder Knoten kann Services anbieten. Ein Service zeichnet sich durch eine Anfrage gefolgt von einer Anwort aus. Services werden verwendet um bestimmt funktionen in Knoten aufzurufen. Zum Beispiel um einen Zustand abzufragen oder um einen Reset durchzuführen. Die initative geht hierbei vom Anfragenden aus. Dies unterscheidet sich von den Nachrichten (Messages) die abboniert werden. Wie …
Weiterlesen
Ist es möglich Eingaben auf der Seriellen-Schnittstellen per Interrupt abzufangen? Die Antwort is wohl eher jain, es ist möglich die Serial Event Funktion zu verwenden. Diese wird nach jeder Loop ausgeführt, unterbricht diese aber nicht. Zweck Benutzereingaben über Terminal Kommunikations mit anderen Geräten über die Serielle-Schnittstelle Nötige Bibliotheken Keine Programm Es gibt in der Arduino-Gui …
Weiterlesen
Ich habe mal angefangen mich mit ROS zu veschäftigen, irgendwann stösst man auf die Information das auch ohne physikalischen Roboter das Verhalten simulieren werden kann. Einwenig mehr in die Materie eingelesen fand ich mich vor zich Tutorials wieder die ich mit den dort vorhandenen Informationen nicht ausprobieren konnte. Somit stellt ich mir die Frage was …
Weiterlesen