Last Updated on 12. Juli 2019 by sfambach
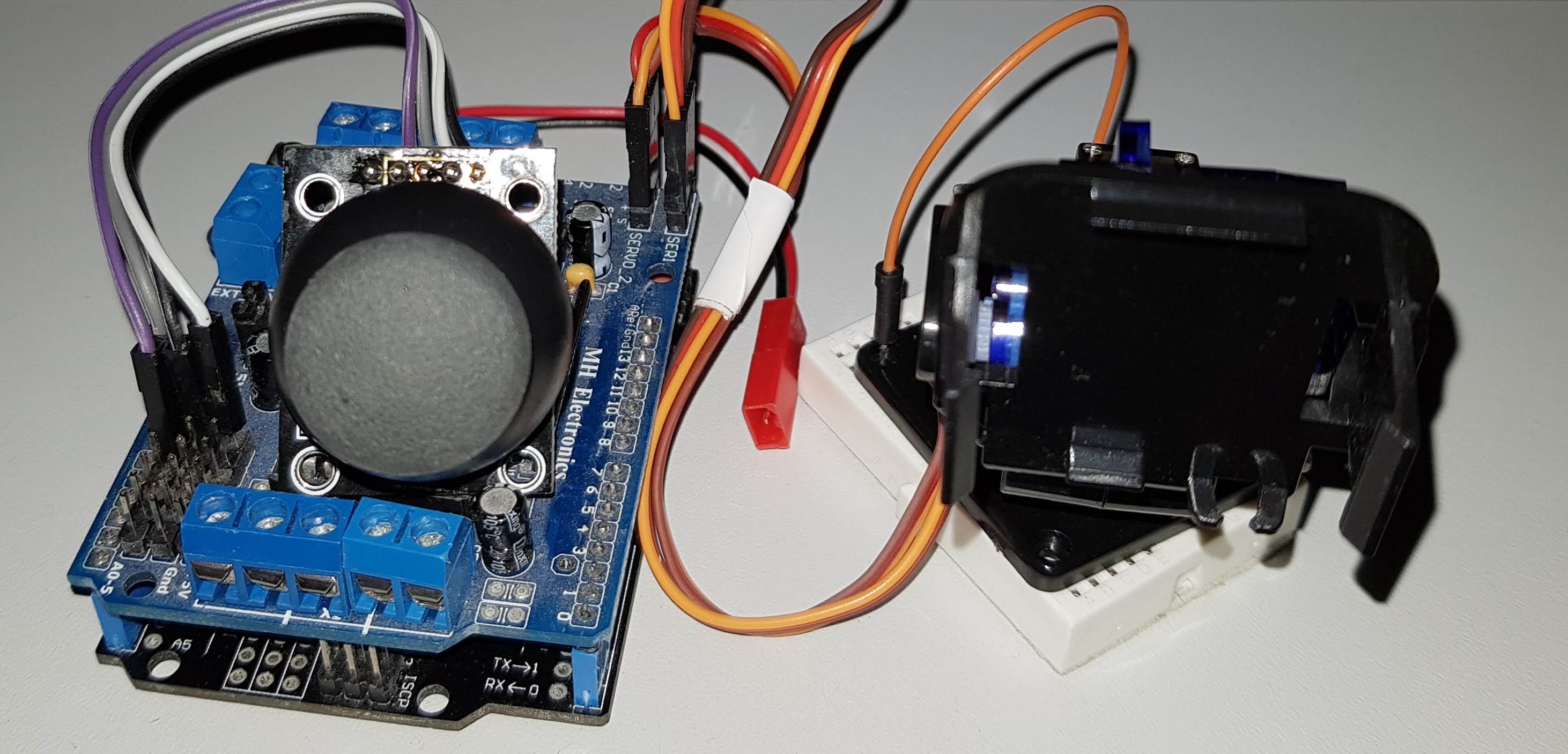
Ich hatte einen Joystick, einen Arduino und einen Pan Tilt übrig und dachte mir das könnte man doch mal kombinieren. Seht was dabei raus gekommen ist.
Fakten
Das habe ich gebraucht:
- Analoger Joystick mit zwei achsen
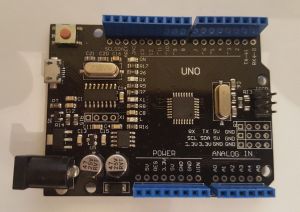
- Ardurino Uno oder ähnlich
- PanTilt mit zwei Servos
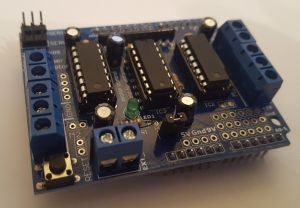
- Motorplatine V1 (praktisch aber nicht nötig)
- Ein paar Pinheader Kabel Buchse auf Buchse
Anwendungsbereiche
- Fergesteuertes schwenken und neigen einer Kamera
- pfff … weiss nicht … Teil eines Wurm- oder Schlangenroboters
Ansichten


Pan/Tilt fertig zusammengebaut
Programmierung
Bibliotheken
Es werden keine zusätzlichen benötigt.
Testprogramm 1
Das Programm ist gänzlich einfach aufgebaut, es holt die Stellung des Joysticks und rechnet sie direkt, mit Hilfe des Map Befehls in Servo Einstellungen um.
So siehts aus
Probleme
Die Steuerung ist sehr ungenau weil der Joystick sehr kurze Fahrwege hat. Evtl. gibts es hier bessere als die Chinaware.
Fazit
Das Projekt war leichter als gedacht und eigentlich mit zwei Zeilen Code erledigt.
Verwandte Beiträge
- Retro Projekt – FDC USB Floppy Disk Controller
- Arduino Nano 33 BLE
- Arduino Nano 33 IOT
- Preview – Arduino Motor Shield mit L298P
- Preview – Arduino Mega Logger Shield
- Preview – Prototyp Schild für Arduino Mega
- Preview – Arduino Nano Zusatzplatine
- Preview – Arduino Mini ATMEGA328P 328
- Arduino Ethernet Platine W5100
- Arduino VS1053 MP3 Audio Shield mit TF Karte