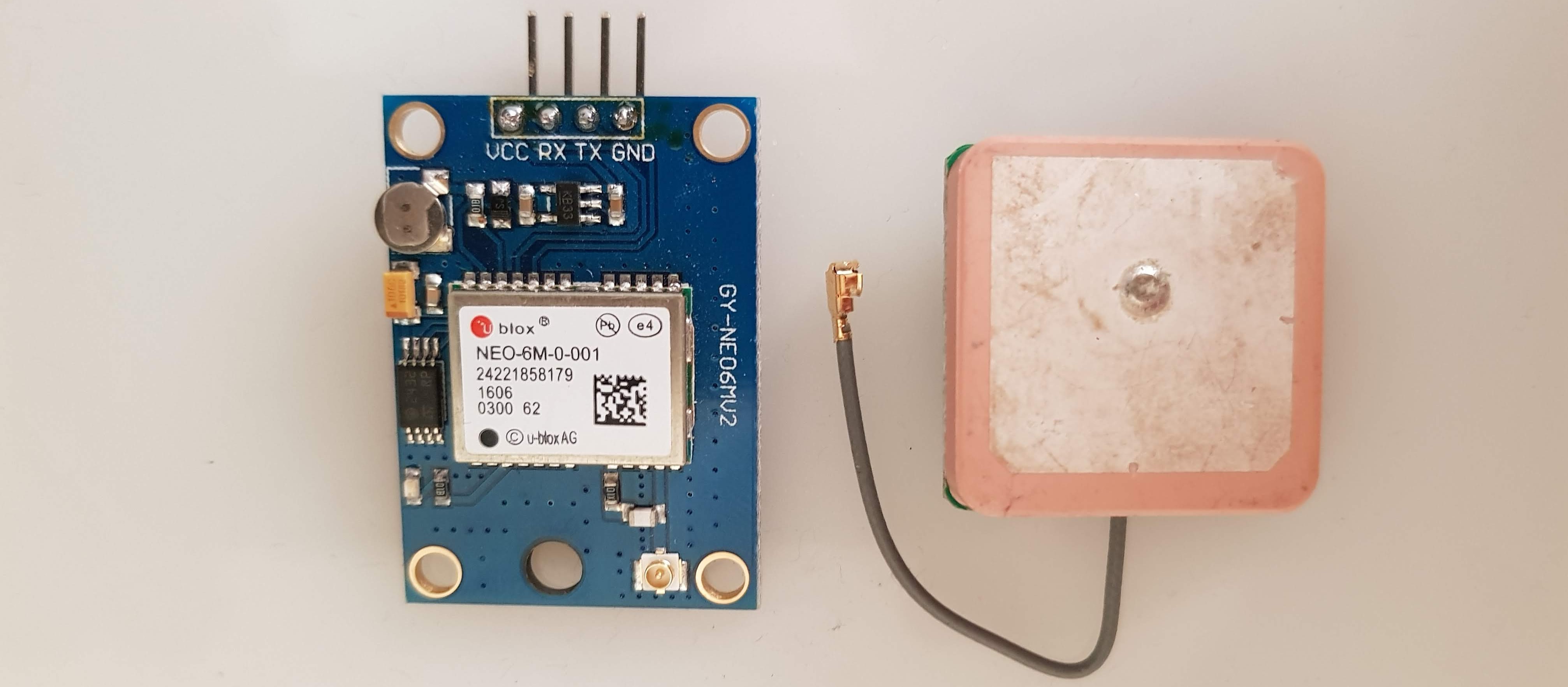
GY-NEO6MV2 GPS MODUL
GPS zum kleinen Preis.
Weiterlesen
GPS zum kleinen Preis.
Weiterlesen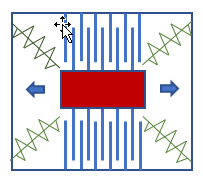
Beschleunigungssensoren messen wie der Name schon sagt die Beschleunigung eines Körper, zum Beispeil eines Autos. Moderne Sensoren messe die Beschleuniung in alle drei Dimensionen (X,Y,Z, Richtung). Über die Beschleunigung lässt sich die Geschwindigkeit eines Köpers errechnen und somit bedingt (Fehler behaftet) eine Position bestimmen. Einsatzzwecke Flugzeugbau Drohnen und ähnliches Navigation Automobilbau Smartphones Satelliten Funktionsweise Die …
Weiterlesen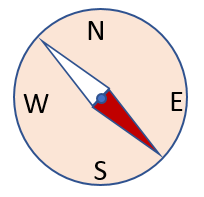
Ein elektronischer Kompass ermittelt ähnlich einem magnetischen Kompasses die Nordrichtung. Die meisten elektronischen Kompasse machen dies nicht nur in X/Y Richtung sondern auch dreidimenstional in X/Z – Y/Z Richtung. Einsatzzwecke Flugzeugbau Drohnen und ähnliches Navigation Automobilbau Smartphones Satelliten Funktionsweise Ein elektronischer Kompass wird auch Magenetometer genannt. Er basiert auf dem Hall-Effekt. Trifft ein Strom durchflossener …
Weiterlesen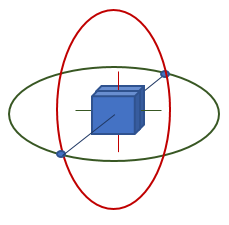
Ich wollte mal verstehen was so ein Gyroskop kann, macht und wo es hilft. Hier meine gesammelten Erkenntnisse. Ein traditionelles Gyroskop misst die Ausrichtung eines Objektes im Raum, mit Hilfe einer rotierenden „trägen“ Masse. Moderne elektronische Gyroskope funktionieren nach einem anderen Prinzip, z.B mit zwei Piezo Elementen. Erfüllen aber den selben Zweck. Einsatzzwecke Flugzeugbau Drohnen …
Weiterlesen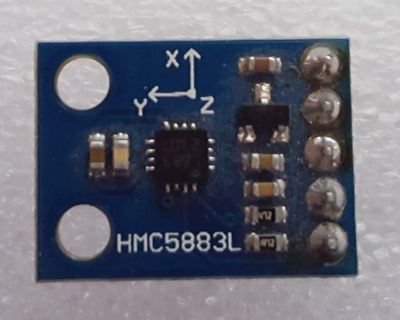
Der HMC5883L ist ein Kompass welcher über den I2c Bus angesteuert werden kann. Er wird über die Bus-Adresse 0x1E abgefragt und kann die Orientierung eines Gegenstandes, auf dem er montiert ist, feststellen. Ansicht Daten Grundlagen Schaltung Anschluss GND Masse DRDY ?? SDA I2C SDA SCL I2C SCL VCC 5 V Einsatzzwecke Richtungsbestimmung Orientierung von Roboter Erweiterung …
Weiterlesen