Last Updated on 31. Mai 2019 by sfambach
Ansteuerung eines Ultraschall-Entfernungsmessers US-100 mit dem Raspberry PI3 ( oder früher). Ich habe nur Tutorials für den SR-04 gefunden, dieser wird allerdings analog zum US-100 eingebunden.
Hardware
PI3 (oder älter bitte auf die richtigen Pins achten)
US-100 ( Ultraschallsensor)
Brot-Board (zum leichteren Aufbau)
Diverse Kabel ( Vorgefertigte Pin-Header Kabel)
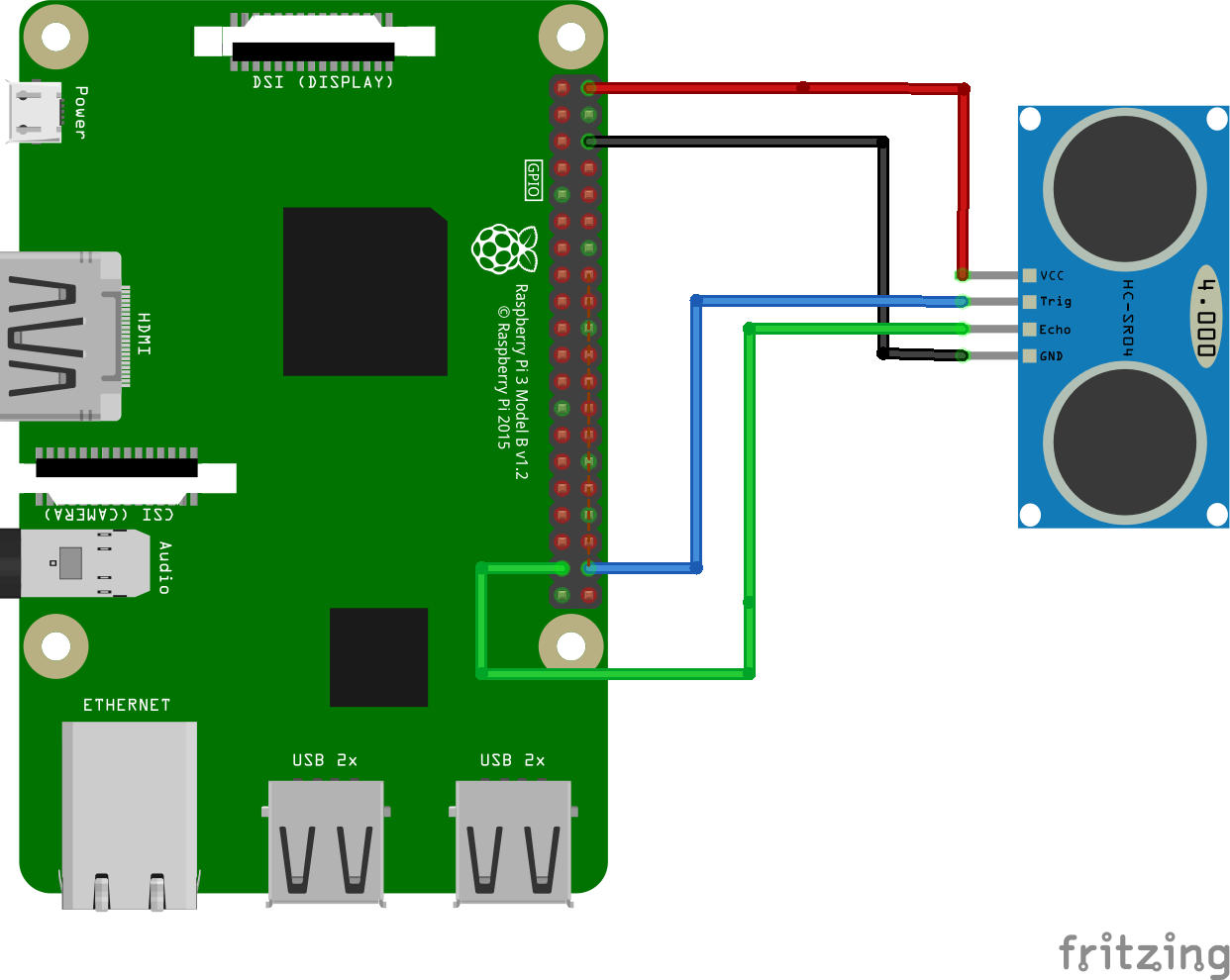
Aufbau
Der US-100 arbeitet mit 3.3V womit man ihn direkt am Raspberry betreiben kann.
Verdrahtung
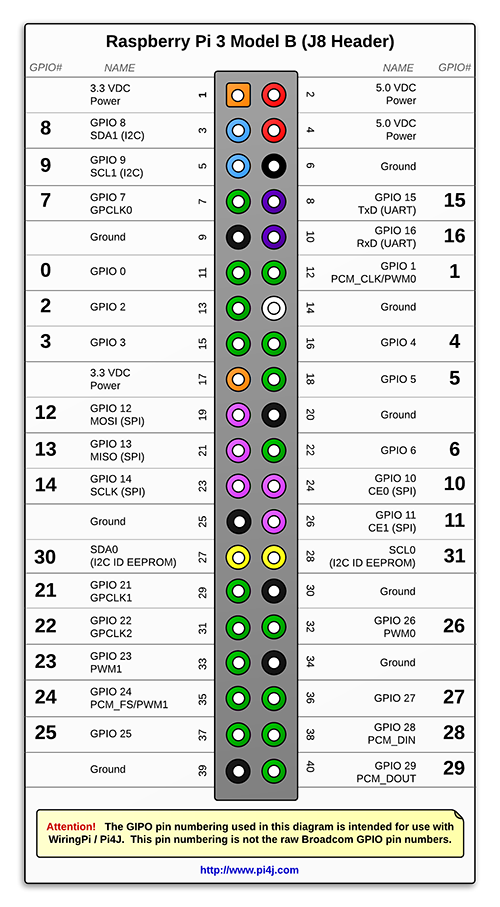
- Trigger Pin am GPIO 28
- Echo Pin an den GPIO 25
(Die GPIOs gelten nur in Verbindung mit pi4j und wirePi)
Software
Entwicklungsumgebung
Als Entwicklungsumgebung verwende ich BlueJ auf dem PI selbst. Hiermit habe ich zwei Klassen erstellt.
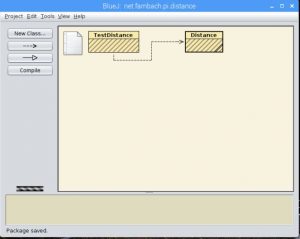
Code
Distance-Klasse
Klasse zur Steuerung des US-015, mit den Methoden
- getDistanceMM – Entfernung in Millimetern
- getDistanceCM – Entfernung in Zentimetern
[gistpen id=“156″]
Test-Klasse
Klasse mit Main-Methode zum Testen der Distance-Klasse. In der Main-Methode wird alle 5 Sekunde ein neuer Wert vom Sensor abgefragt und auf die Console geschrieben.
[gistpen id=“158″]
Tips
Bei größerer Beanspruchung des PI ist zu beachten, dass Java die zeitlichen Abfolgen nicht garantiert. Somit kann es zu verfälschten oder keinen Ergebnissen bei der Messung kommen.
Verwandte Beiträge
Quellen
Interfacing HC-SR04 Ultrasonic Sensor with Raspberry Pi
Entfernung messen mit Ultraschallsensor HC-SR04 – Raspberry Pi
Anhang
Pin-Belegung
| Datum | Änderung | Autor |
|---|---|---|
| 05.06.2017 | Beitrag erstellt | sfambach |